# Симулятор
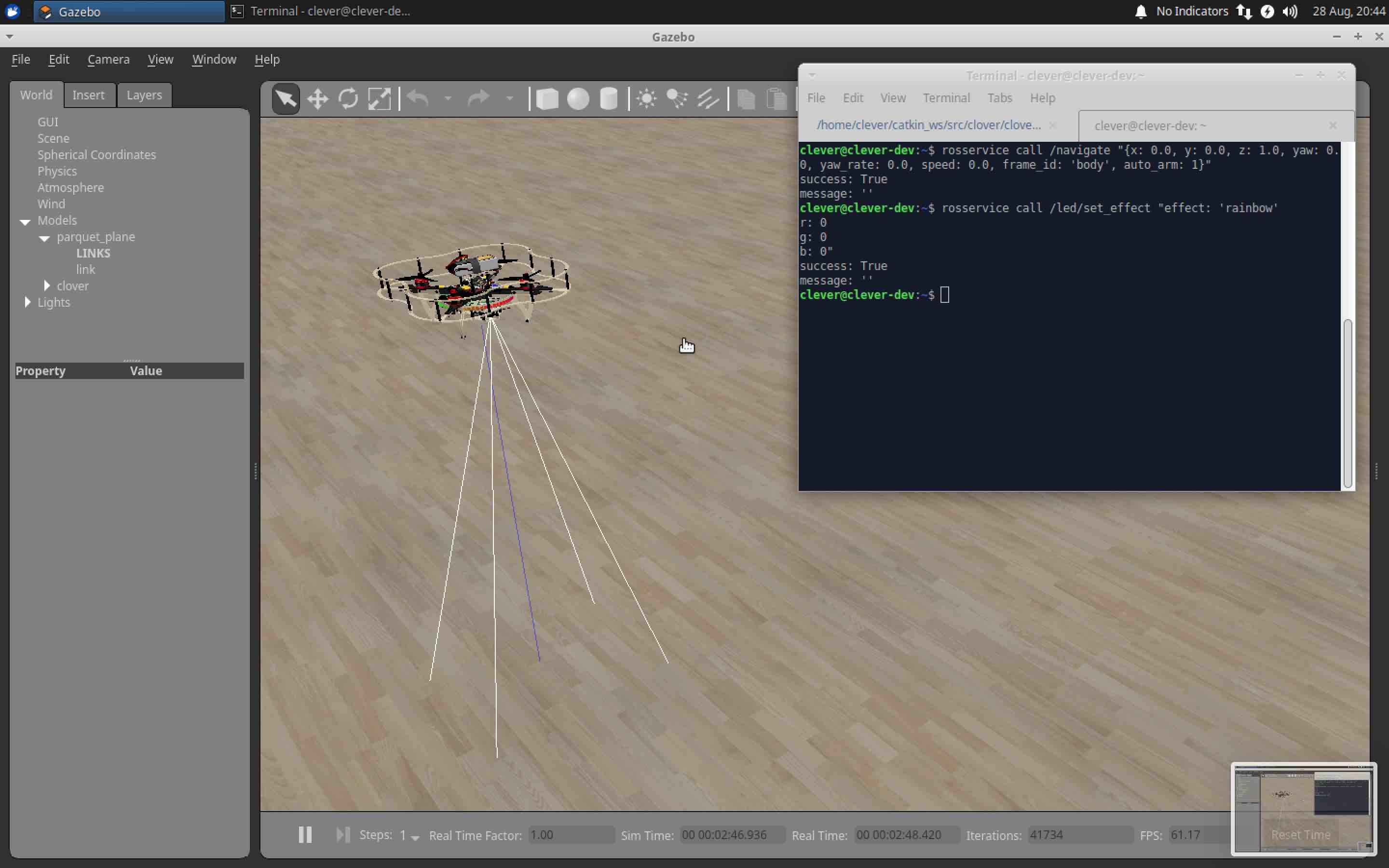
Среда симуляции КлевБВСера позволяет пользователям запускать и отлаживать свой код в симуляторе, используя большинство функций, доступных на реальном дроне. Симулятор использует [режим PX4 SITL](sitl.md) и тот же код, использующий ROS, что и настоящий дрон. Большинство железа также симулируется.
## Особенности
Устанавливаемая пользователем среда включает в себя:
* высококачественную модель БВС 4;
* плагины Gazebo для железа КлевБВСера (например, для светодиодной ленты);
* легко изменяемые файлы описания дрона в формате [`xacro`](https://wiki.ros.org/xacro);
* примеры моделей и миров;
* [`roslaunch`](https://wiki.ros.org/roslaunch) файлы для быстрого запуска и настройки.
Кроме того, предоставляется [образ виртуальной машины](simulation_vm.md), который максимально точно имитирует реальный дрон.
Особенности:
* легкий доступ к симулятору;
* установлен и настроен для работы с ROS Visual Studio Code;
* веб-сервер (Monkey) для плагинов БВС, работающих в браузере;
* постоянно работающий сервис `roscore`;
* средства визуализации (`rviz`, `rqt`).
## Состав симулятора
Симулятор основан на следующих элементах:
* [Gazebo](http://gazebosim.org/), универсальная среда симуляции для любых типов роботов;
* [PX4](https://px4.io/), в частности, его компонент SITL (software-in-the-loop);
* [`sitl_gazebo`](https://github.com/PX4/sitl_gazebo) пакет, содержащий плагины Gazebo для PX4;
* пакеты ROS и плагины Gazebo;
## Видео
Краткий видеообзор симулятора:
 ## Особенности
Устанавливаемая пользователем среда включает в себя:
* высококачественную модель БВС 4;
* плагины Gazebo для железа КлевБВСера (например, для светодиодной ленты);
* легко изменяемые файлы описания дрона в формате [`xacro`](https://wiki.ros.org/xacro);
* примеры моделей и миров;
* [`roslaunch`](https://wiki.ros.org/roslaunch) файлы для быстрого запуска и настройки.
Кроме того, предоставляется [образ виртуальной машины](simulation_vm.md), который максимально точно имитирует реальный дрон.
Особенности:
* легкий доступ к симулятору;
* установлен и настроен для работы с ROS Visual Studio Code;
* веб-сервер (Monkey) для плагинов БВС, работающих в браузере;
* постоянно работающий сервис `roscore`;
* средства визуализации (`rviz`, `rqt`).
## Состав симулятора
Симулятор основан на следующих элементах:
* [Gazebo](http://gazebosim.org/), универсальная среда симуляции для любых типов роботов;
* [PX4](https://px4.io/), в частности, его компонент SITL (software-in-the-loop);
* [`sitl_gazebo`](https://github.com/PX4/sitl_gazebo) пакет, содержащий плагины Gazebo для PX4;
* пакеты ROS и плагины Gazebo;
## Видео
Краткий видеообзор симулятора:
## Особенности
Устанавливаемая пользователем среда включает в себя:
* высококачественную модель БВС 4;
* плагины Gazebo для железа КлевБВСера (например, для светодиодной ленты);
* легко изменяемые файлы описания дрона в формате [`xacro`](https://wiki.ros.org/xacro);
* примеры моделей и миров;
* [`roslaunch`](https://wiki.ros.org/roslaunch) файлы для быстрого запуска и настройки.
Кроме того, предоставляется [образ виртуальной машины](simulation_vm.md), который максимально точно имитирует реальный дрон.
Особенности:
* легкий доступ к симулятору;
* установлен и настроен для работы с ROS Visual Studio Code;
* веб-сервер (Monkey) для плагинов БВС, работающих в браузере;
* постоянно работающий сервис `roscore`;
* средства визуализации (`rviz`, `rqt`).
## Состав симулятора
Симулятор основан на следующих элементах:
* [Gazebo](http://gazebosim.org/), универсальная среда симуляции для любых типов роботов;
* [PX4](https://px4.io/), в частности, его компонент SITL (software-in-the-loop);
* [`sitl_gazebo`](https://github.com/PX4/sitl_gazebo) пакет, содержащий плагины Gazebo для PX4;
* пакеты ROS и плагины Gazebo;
## Видео
Краткий видеообзор симулятора: