Первоначальная настройка
Установка QGroundControl
QGroundControl – программное обеспечение, необходимое для прошивки, настройки и калибровки полетного контроллера Клевера.
Скачайте и установите установочный файл для Windows/Linux/macOS с официального сайта QGroundControl. В случае необходимости согласитесь с установкой дополнительных драйверов при установке.
См. также основную документацию по QGroundControl.
Настройка полетного контроллера
Все дальнейшие настройки и калибровки полетного контроллера могут быть выполнены без проводов с применением доступа к полетному контроллеру по Wi-Fi через Raspberry Pi.
Обзор главного окна настроек QGroundControl:
- Параметры, нуждающиеся в настройке: Airframe, Radio, Sensors, Flight Modes.
- Текущая прошивка контроллера.
- Текущий полетный режим.
- Сообщения об ошибках.
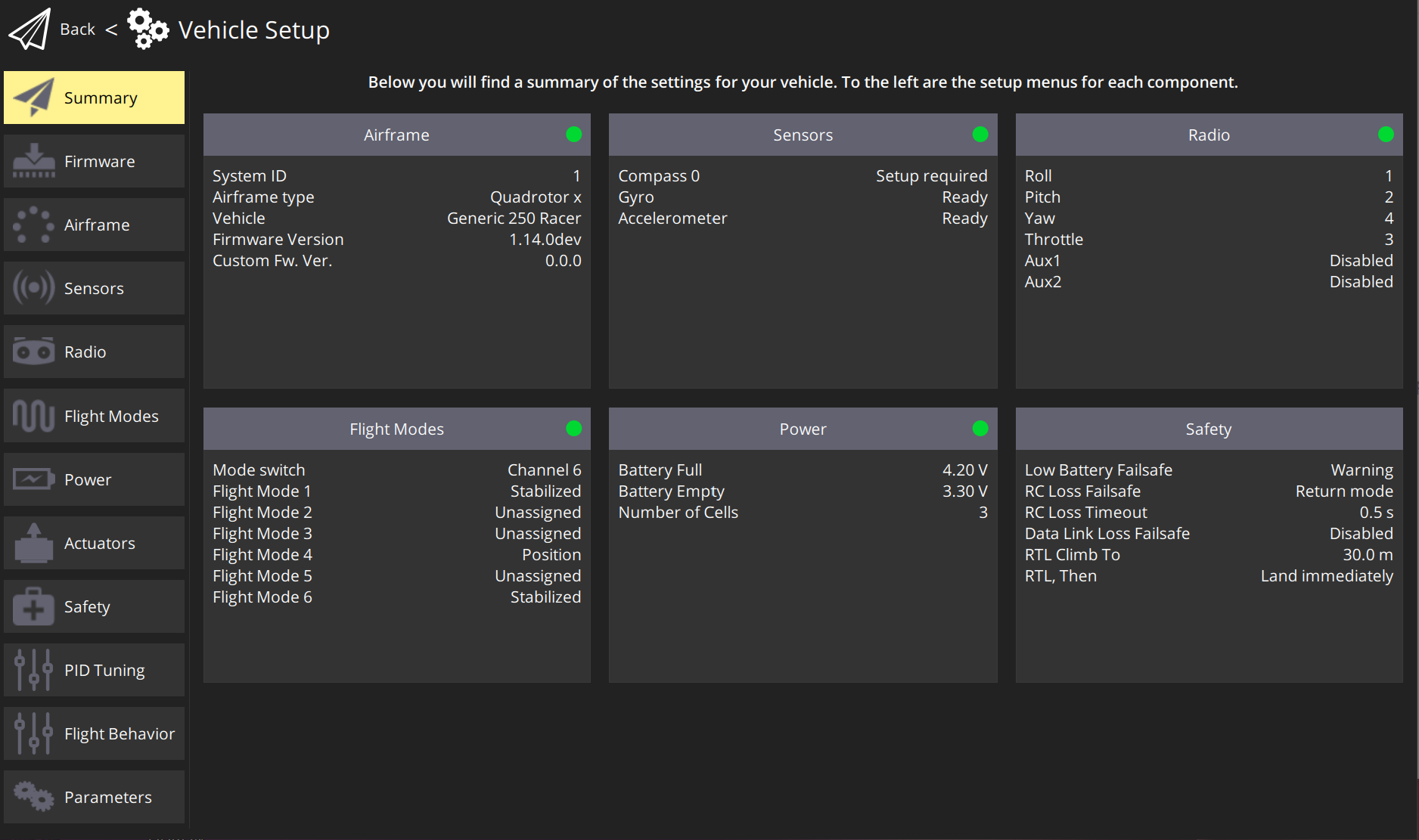
Выбор рамы
- Зайдите во вкладку Vehicle Setup.
- Выберите меню Airframe.
- Выберите тип рамы Quadrotor X.
- Для Клевера 4 выберите подтипа рамы COEX Clover 4. В ином случае – Generic Quadrotor X.
- Переместитесь в начало списка и нажмите кнопку Apply and Restart, подтвердите нажатием Apply.
- Дождитесь применения настроек и перезагрузки полетного контроллера.
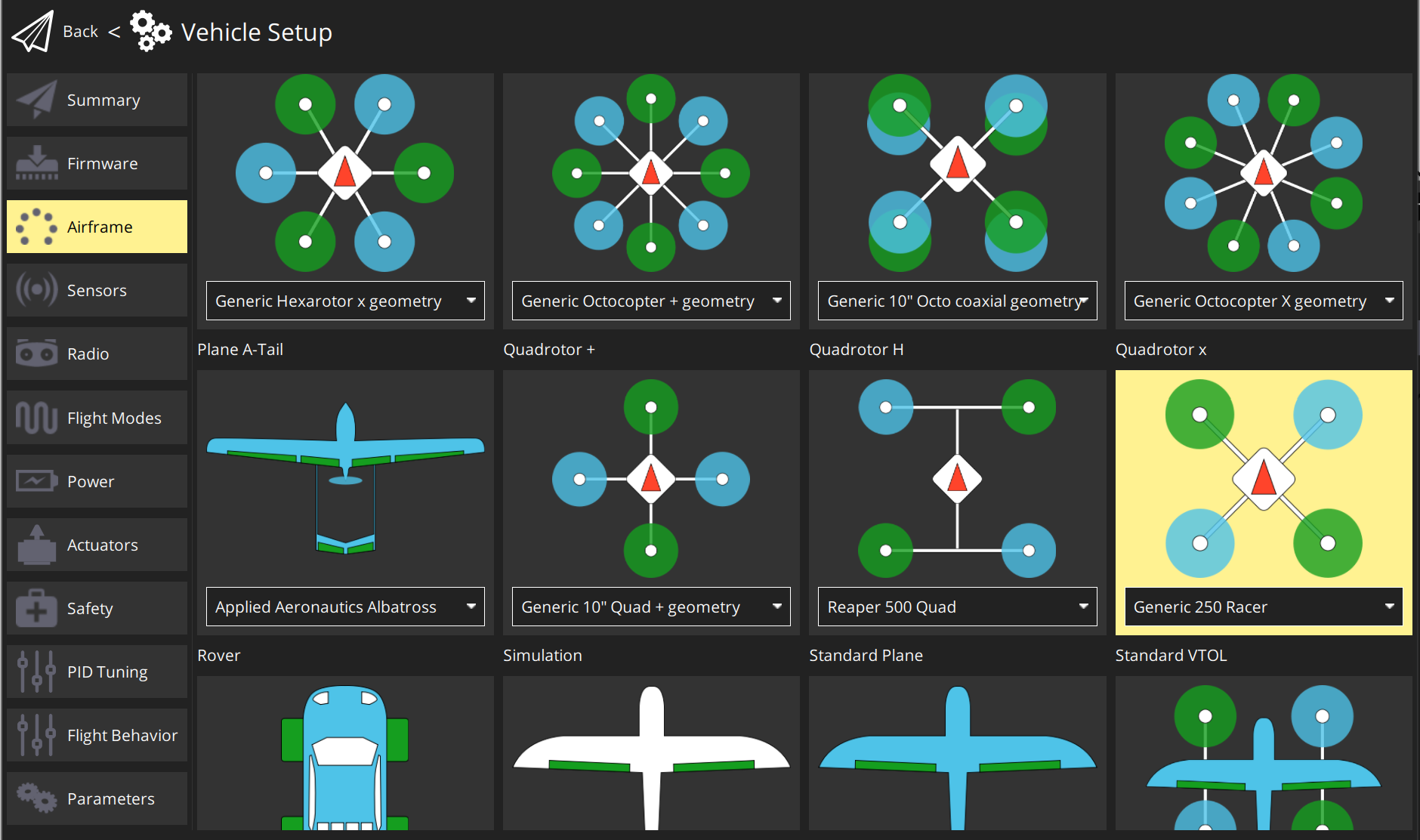
Параметры
Для настройки параметров полетного контроллера войдите во вкладку Vehicle Setup и выберите меню Parameters. Вы можете использовать поле Search для поиска параметров по имени. Рекомендуемые параметры для Клевера приведены в дальнейшей документации а также в соответствующей сводной статье.
После установки параметра необходимо нажать кнопку Save. При необходимости – перезагрузить полетный контроллер, нажав кнопку Tools, затем Reboot vehicle.
Настройка PID-регуляторов
Усредненные коэффициенты PID для Клевера
MC_PITCHRATE_P= 0.079999998211860657MC_PITCHRATE_I= 0.200000002980232239MC_PITCHRATE_D= 0.001000000047497451MC_PITCH_P= 8.000000000000000000MC_ROLLRATE_P= 0.079999998211860657MC_ROLLRATE_I= 0.250000000000000000MC_ROLLRATE_D= 0.00100000004749745MC_ROLL_P= 8.000000000000000000MPC_XY_VEL_P_ACC= 4.000000000000000000MPC_XY_VEL_D_ACC= 0.000000000000000000MPC_XY_P= 0.949999988079071045MPC_Z_VEL_P_ACC= 4.000000000000000000MPC_Z_P= 1.000000000000000000
Проверить все параметры можно скачав этот файл
Необходимо учитывать, что для идеального полета параметры PID-регуляторов подбираются вручную для каждого конкретного собранного квадрокоптера. Вы можете узнать больше об этом в статье "Настройка PID-регуляторов".
Параметры Circuit breaker
- Чтобы коптер мог летать с подключением по USB, установите параметр
CBRK_USB_CHKв 197848. - Отключите проверку Safety Switch:
CBRK_IO_SAFETY= 22027.
Далее: Калибровка датчиков.