Инструкция по сборке конструктора программируемого квадрокоптера «Сверх»
| Метизы | |
| Винты м2х6 - 18 шт | |
| Винты м2х8 - 14 шт | |
| Винты М2x10 - 6 шт | |
| Винты М2x12 - 2 шт | |
| Винты М2x20 - 4 шт | |
| Гайки М2 - 6 шт | |
| Детали | |
 |
Нижняя рама |
 |
Верхняя рама |
 |
Пластиковая деталь для деки |
 |
Компьютерная дека |
 |
Модуль камеры |
 |
Модуль ESP |
 |
Боковые защиты - 2 шт |
 |
Ножки - 2 шт |
 |
Прижим для компьютера - 2шт |
 |
Пропеллеры - 4 шт |
| Электроника | |
 |
Моторы 6500 kv - 4 шт |
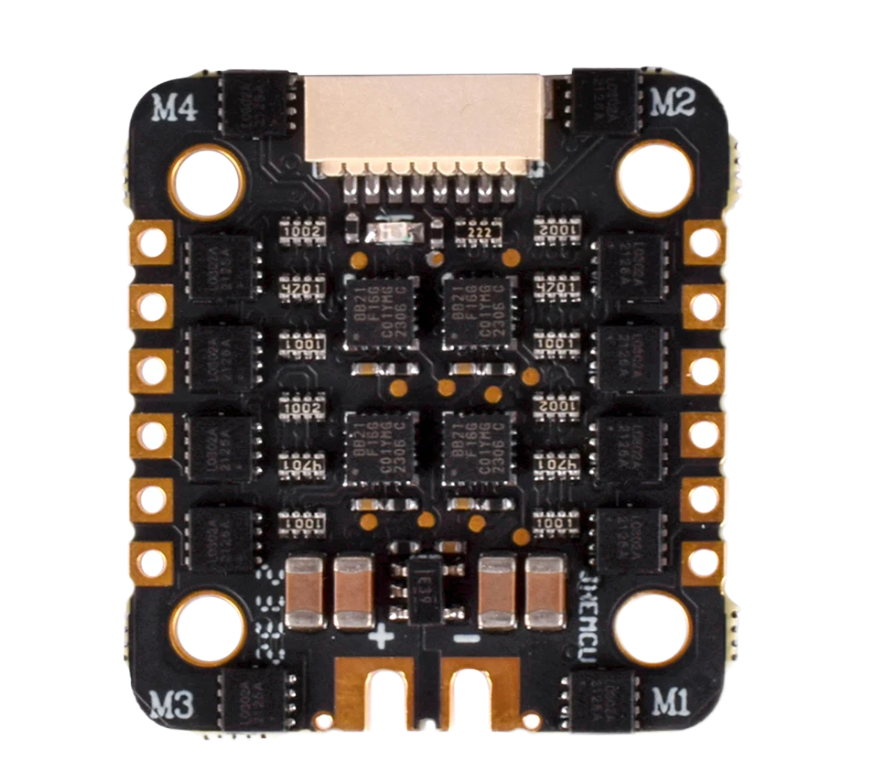 |
Регулятор скорости |
 |
ESP |
 |
Конденсатор |
 |
Адаптер |
 |
DC-DC понижающий преобразователь - 2 шт |
 |
Приемник |
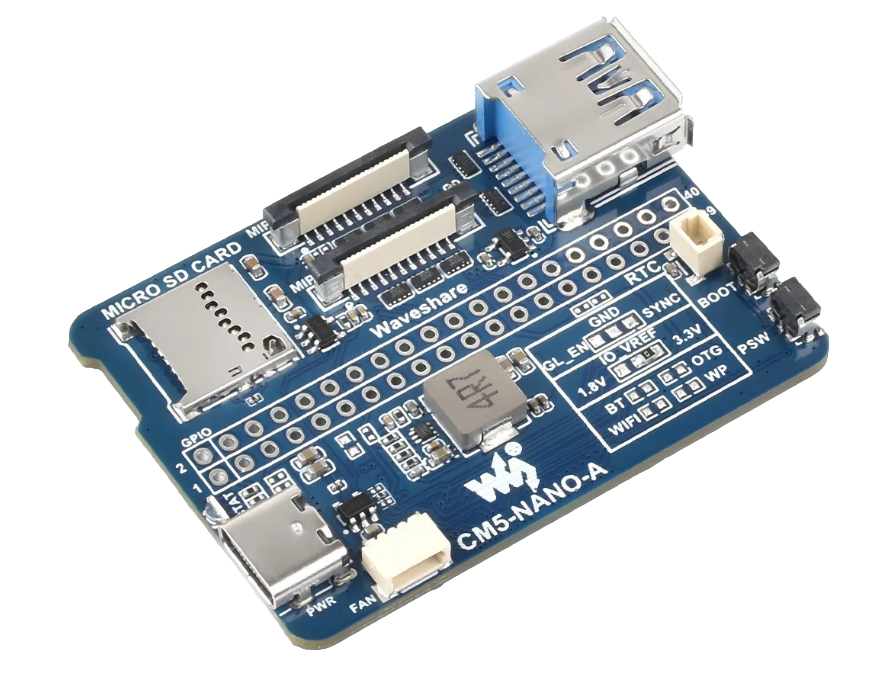 |
Плата |
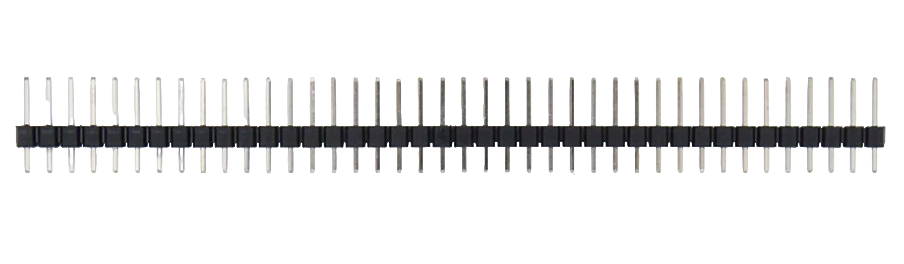 |
Соединительные штыри |
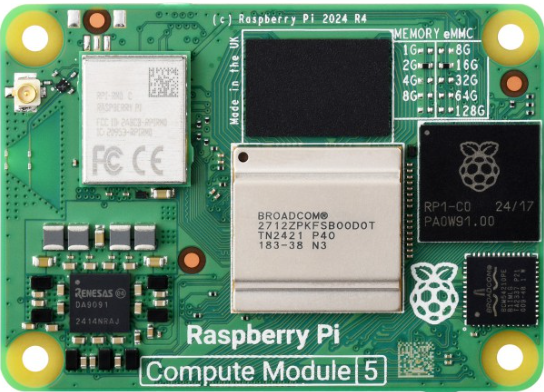 |
Raspberry Pi |
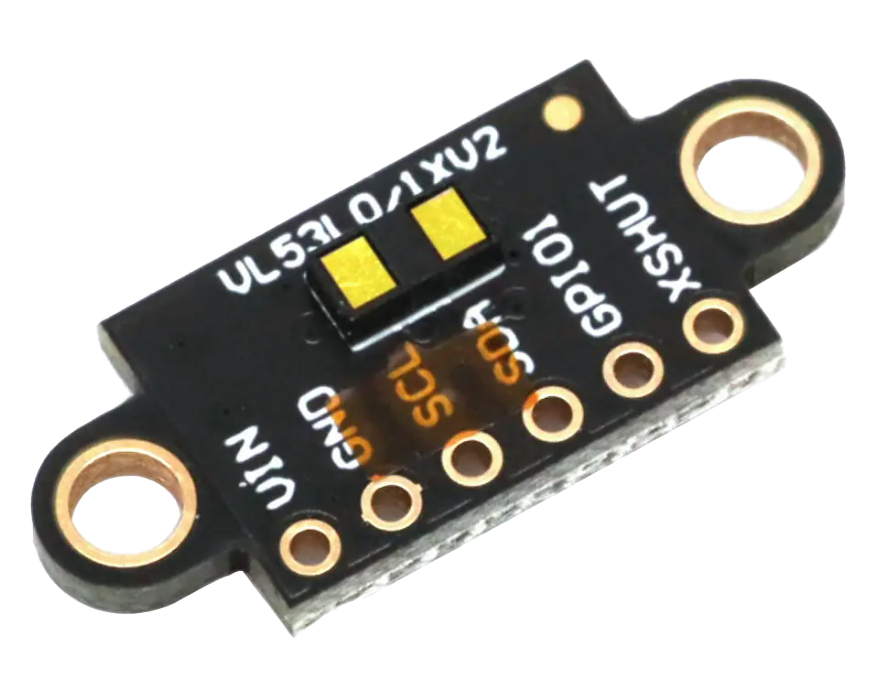 |
Датчик расстояния |
 |
Камера |
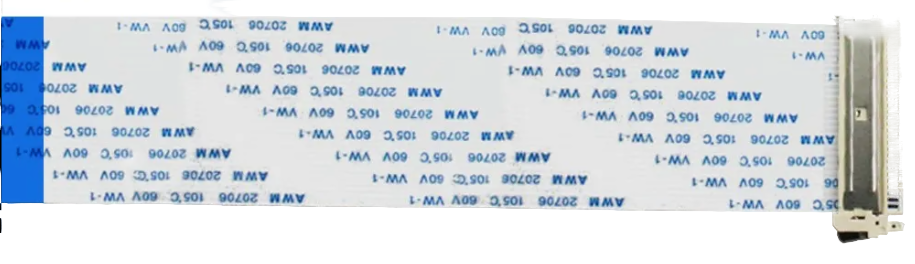 |
Шлейф |
| Расходники | |
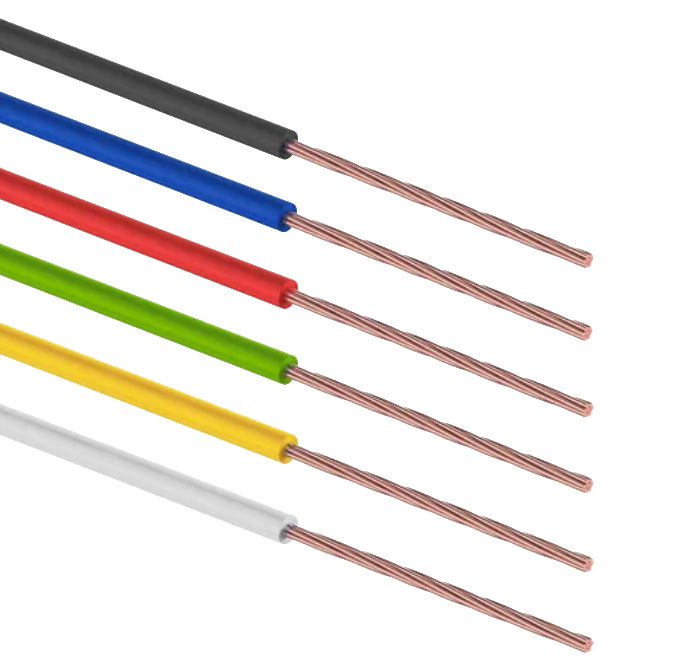 |
Провода |
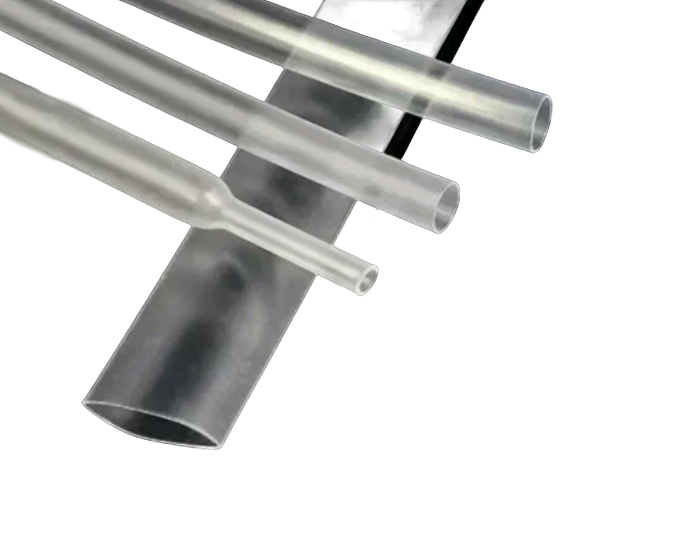 |
Термоусадка |
 |
Флюс |
 |
Припой |
 |
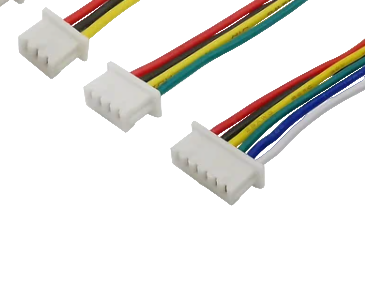
Провода "мама" |
 |
Восьмиконтактный кабель |
 |
Резиновые ножки красные |
 |
Резиновые ножки прозрачные |
 |
Металические втулки |
 |
Стяжки |
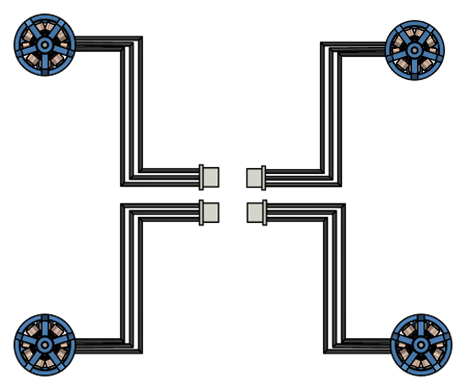
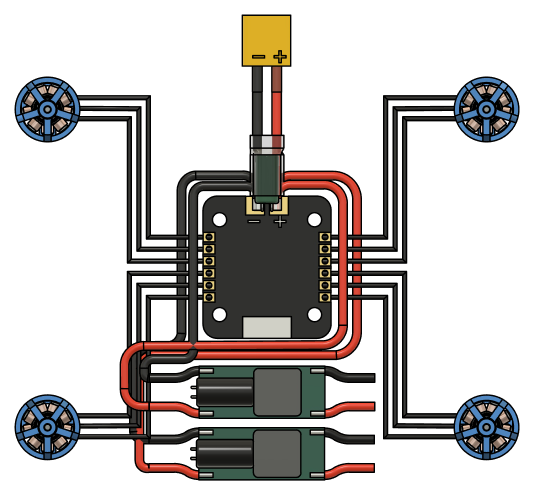
Шаг 1: Пайка моторов
Отрезать коннектор от каждого мотора и зачистить провода.

2 . Припаяйте провода моторов к пинам регулятора скорости соответсвенно картинке.
<img src="../assets/img/electro1.svg" width=700 alt="регулятор скорости + моторы">
Шаг 2: Пайка проводов питания
- Припаять конденденсатор и силиконовые провода к клеммам регулятора скорости: красный провод к плюсу, черынй к минусу.
- Согнуть аккуратно конденсатор, насадить термоусадку на провода питания и конденсатор (использовать фен для усадки).
Припаять провода питания к "гнезду" адаптера (xt30u-m).


Следите за полюсами
Шаг 3: Припайка DC-DC преоразователя
Красный и черный провода не меньше 6 см каждый припаять к обоим dc-dc преобразователя со стороны конденсаторв. Спаять плюсы и минусы преобразователей между собой соответствено.

С другой стороны припаять к одному преобразователю провода "мама" около 20см каждый, к другому трехконтактный шлейф около 5см, к остывшему жёлтому проводу зажать разъем "мама".
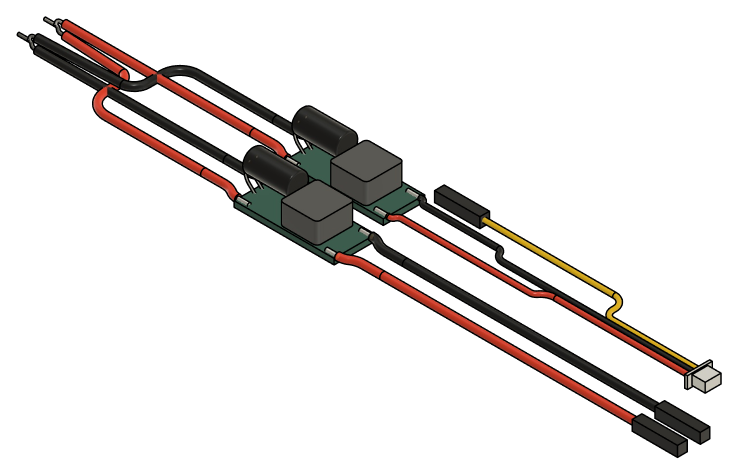
Далее провода выхода из преобразователя не иллюстрируются до Шага 7 пункта 3.
Припаять спаянные преобразователи к регулятору скорости с обратной стороны платы.

Шаг 4: Настройка преобразователя
- Подключить контакты преобразователя к вольтметру.
- Настроить напряжение до 5В.
Надеть и усадить на преобразователи теромосадки.

Шаг 5: Установка резиновых "ножек"
Продеть в отверстия регулятора скорости красные резиновые "ножки" так, чтобы меньшая часть резиновой ножки выходила на лицевую стороны платы. Повторить 4 раза.

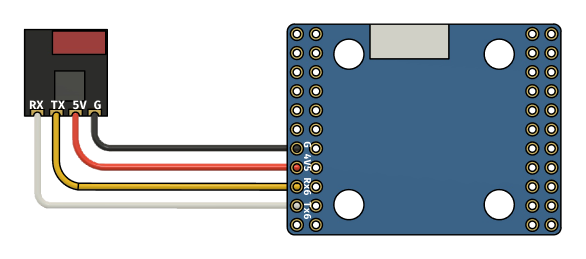
Шаг 6: Припайка elrs-приемника
Припаять провода соответсвенно к приёмнику - полётному контроллеру:
- GND - G (черный)
- 5V - 4V5 (красный)
- TX - Rx6 (жёлтый)
- RX - Tx6 (белый)
Насадить на приёмник термоусадку, поместив скрученные провода под неё.

Продеть в отверстия полётного контроллера белые резиновые "ножки" так, чтобы меньшая часть резиновой ножки выходила на лицевую сторону платы. В "ножки" вставить металлические втулки.

Вставивить восьмиконтактный кабель в коннектор полётного контроллера и регулятора скорости.

Шаг 9: Подготовка конструкции
Вставить шлейф в камеру.

Вставить винты M2x20 в крайние центральные отверстия рамы с нижней стороны.

Вставить винты M2x10 в центральные отверстия рамы со стороны рамы.
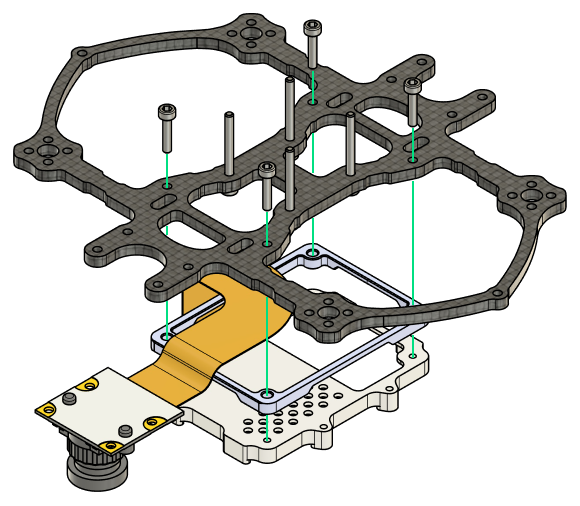
На ранее поставленные винты М2х20 аккуратно продеть регулятор скорости красные резиновые ножки и полетный контроллер так, чтоб шлейф оказался между платами гайками М2.

Провода, ведущие от питания к приобразователям, от преобразователя к коннектору, должны располагаться под регулятором скорости, но не трехконтактный
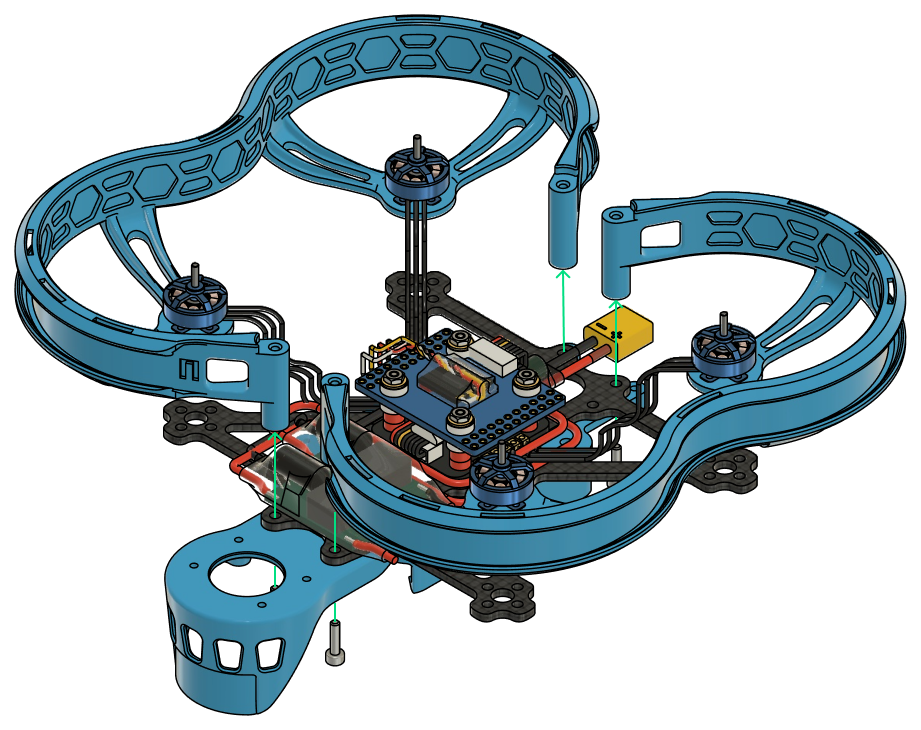
Закрепить защиты 4 винтами М2х8 снизу через крайние отверстия нижней рамы.
Далее провода выхода из преобразователя не иллюстрируются до Шага 8 пункта 3.
Вкуртить 16 винтов М2x8 через ножки, раму, защиту в моторы (по 4 на каждый мотор) и закрепить провода моторов с помощью стяжек на лучах рамы.
Закрепить верхнюю раму 4 винтами М2х8, вкрутив их в защиту.

Закрепить защиту со стороны компьютерной деки 4 винтами М2х8 (должны проходить через крайние отверстия рамы).

Шаг 8: Установка Raspberry Pi, датчика расстояния, камеры
- Припаять соединительные штыри к синей плате (обратите внимание, чтобы припой между штырями не соединялся).
Присоединить плату к Raspberry Pi.

Зачистить провода, оставив в конце разъём "мама", припаять их к датчику расстояния и вставить в припаянные штыри синей платы соответственно.

В защёлку вставить платы. Закрутить 2 винтами М2х6 датчик расстояния и 2 винтами М2х6 вторую защёлку.

Вставить шлейф в камеру и разъём синей платы. Закрепить камеру 4 винтами М2х6.

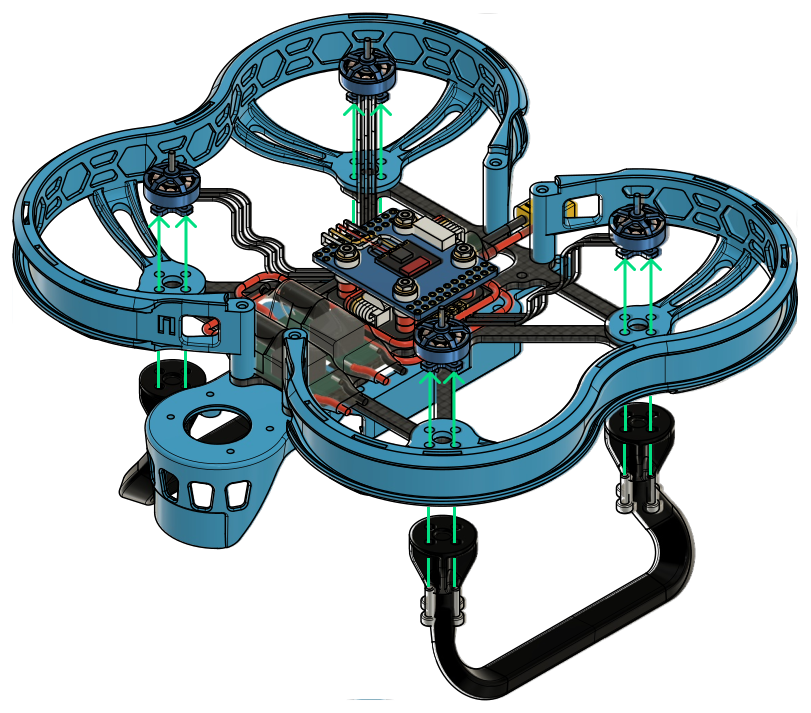
Шаг 9: Завершение сборки
Насадить пропеллеры на моторы и каждый закрепить 2 винтами М2х6.

Аккуратно защелкнуть верхние защиты.
