Настройка полетного контроллера
Так как во время проведения настройки полетного контроллера ваш компьютер будет подключен к Wi-Fi сети бортового компьютера, у вас не будет доступа к сети интернет, убедитесь, что скачали программу QGroundControl (QGC) и файл с параметрами полетного контроллера.
- Включите аппаратуру управления
- Убедитесь, что воздушные винты сняты
- Включите БВС используя АБК либо кабель USB Type-C
- Убедитесь, что БВС подключен к аппаратуре управления (на экране аппаратуры появилась индикация связи с БВС)
- Запустите программу QGC
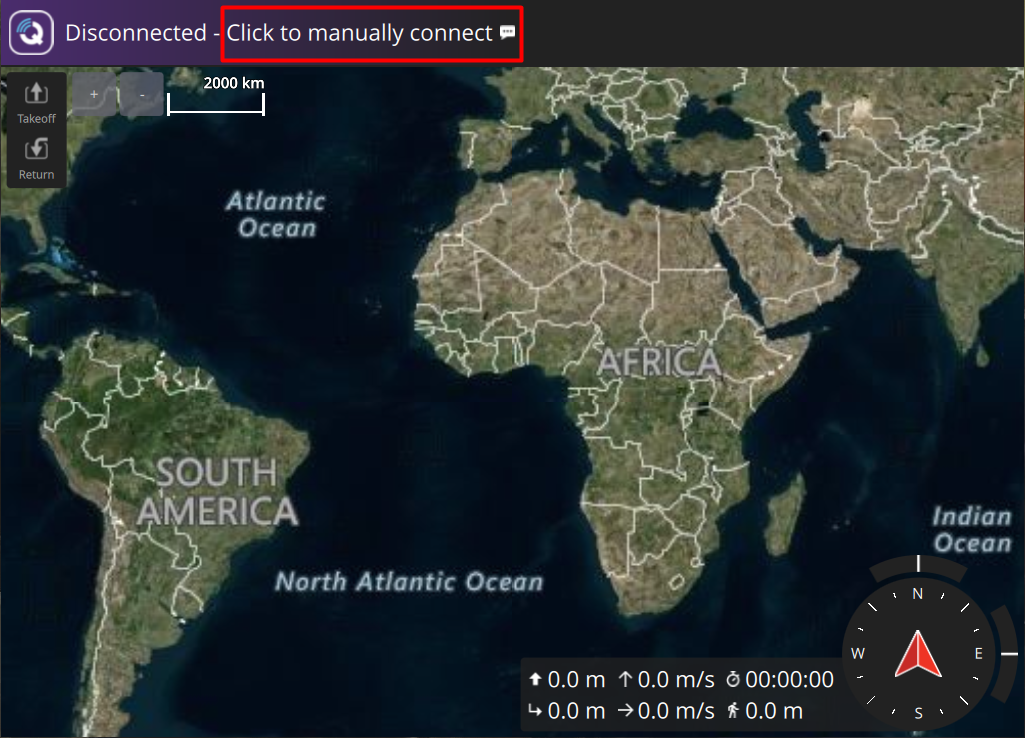
Подключитесь к БВС по Wi-Fi, на главном экране QGC нажмите на Click to manually connect
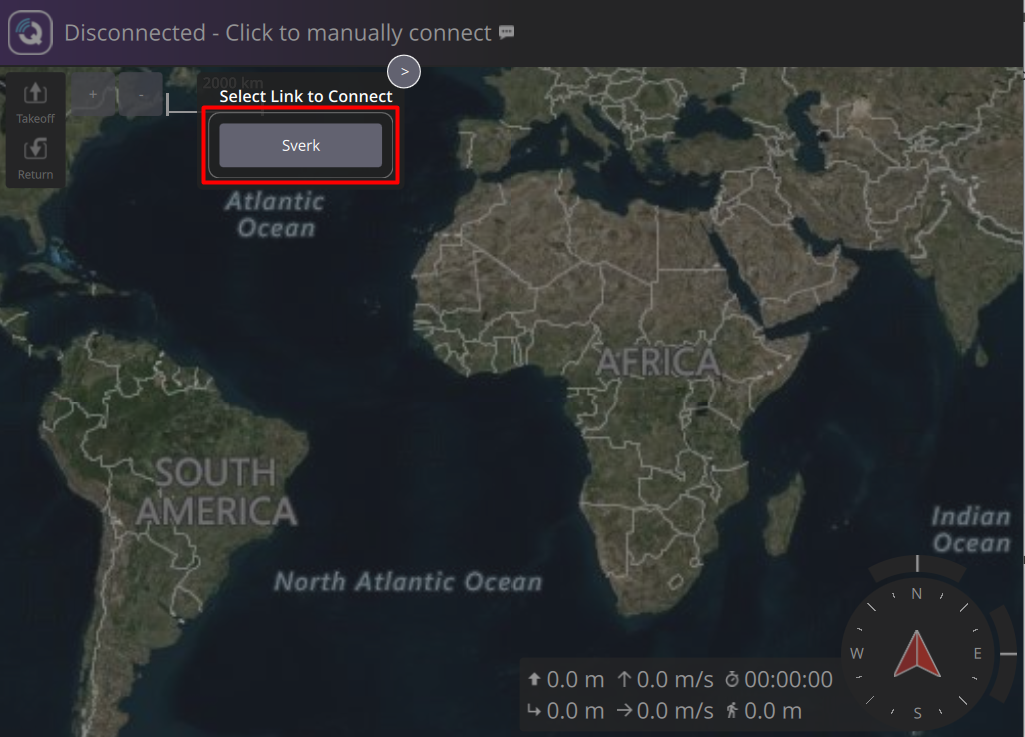
Нажмите на название вашего подключения к БВС. Название на примере Sverk
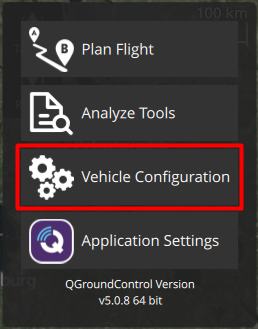
Нажмите на логотип QGC в левом верхнем углу

Выберите Vehicle Configuration
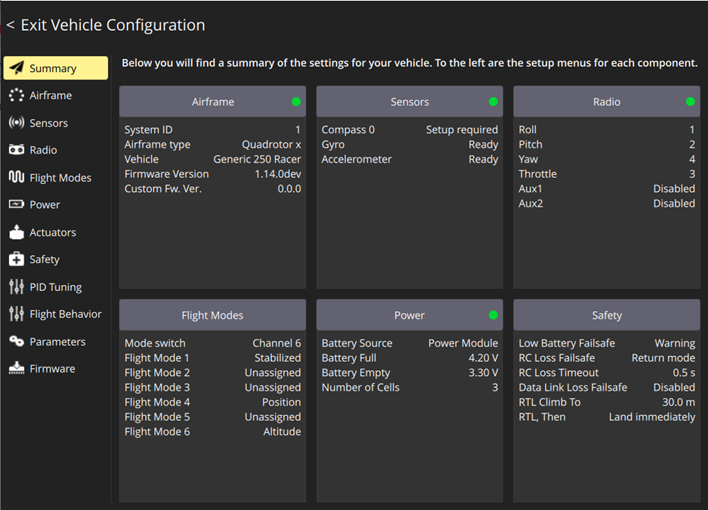
Вкладка Summary содержит информацию о выбранных настройках и состоянии систем (зеленый маркер - система настроена, красный маркер - не настроена)
Шаг 1: Выбор рамы
Во вкладке Airframe выбирается тип планера, соответствующего вашему летательному аппарату
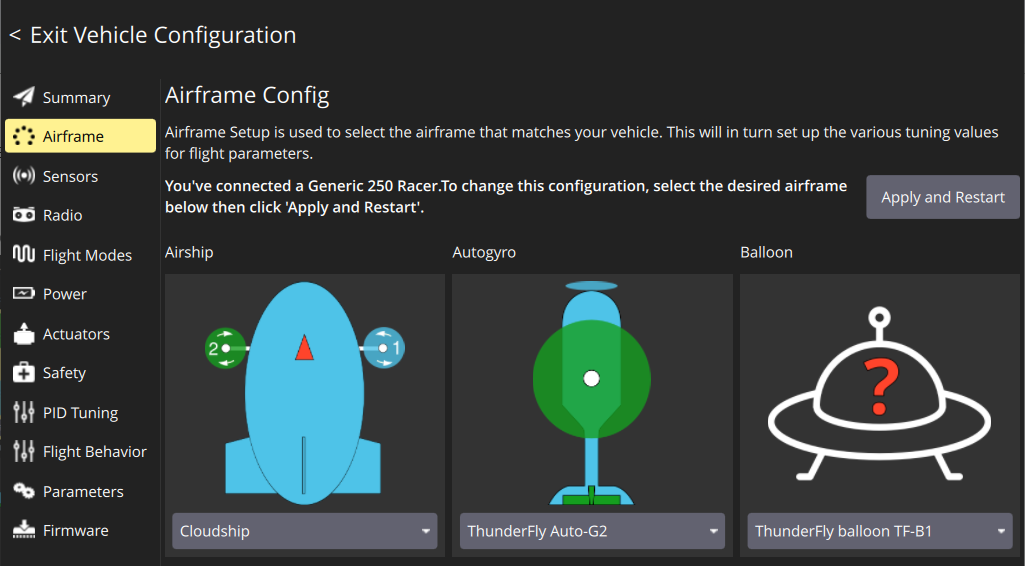
Для БВС выберите тип рамы Quadrotor x подтипа Generic 250 Race, для этого пролистайте вниз до изображения квадрокоптера схемы Х
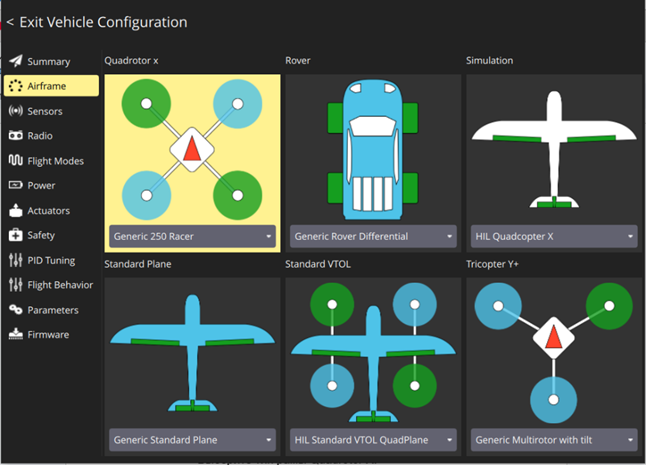
Переместитесь в начало списка и нажмите кнопку Apply and Restart, подтвердите нажатием Apply

Дождитесь применения настроек и перезагрузки полетного контроллера
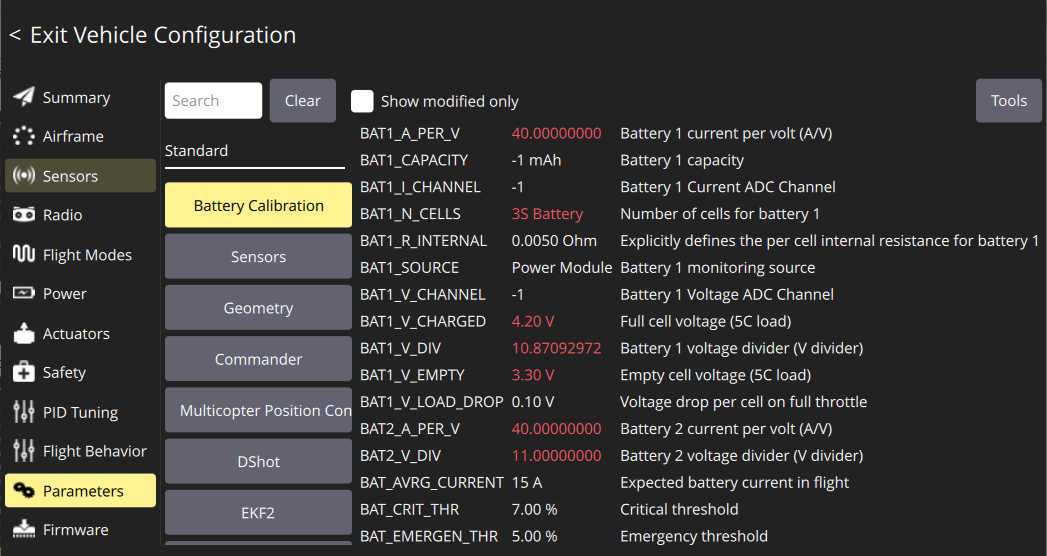
Шаг 2: Загрузка параметров
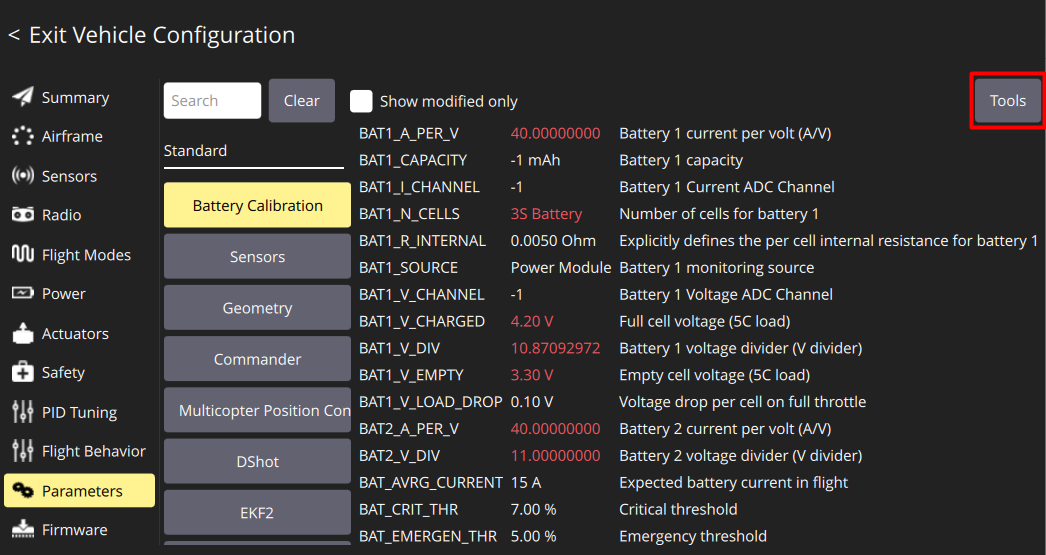
Во вкладке Parameters находятся абсолютно все настройки полетного контроллера, но без удобного графического интерфейса.
Мы загрузим базовый файл параметров, который содержит большую часть настроек. Однако некоторые параметры (такие как тип рамы, калибровка датчиков, аппаратуры управления и питания) требуют ручной настройки, так как зависят от физического состояния вашего конкретного БВС. Сейчас мы загрузим основу, а затем настроим эти параметры вручную.
- Для корректной работы БВС необходимо загрузить параметры из файла
Нажмите кнопку Tools
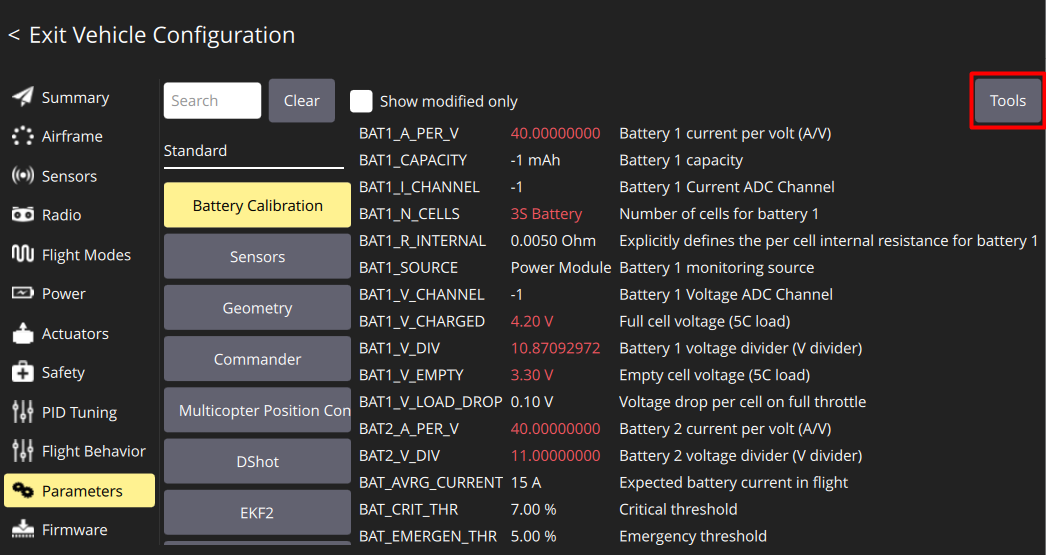
В открывшемся окне выберите Load from file for review
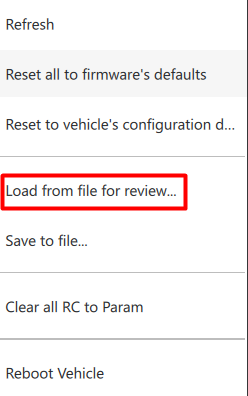
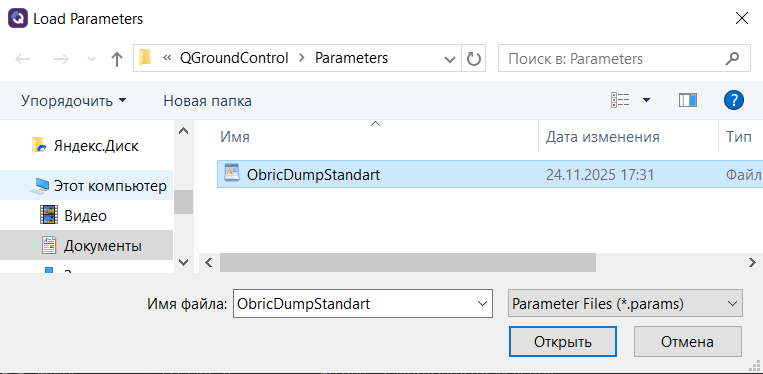
Выберете скаченный файл с параметрами полетного контроллера
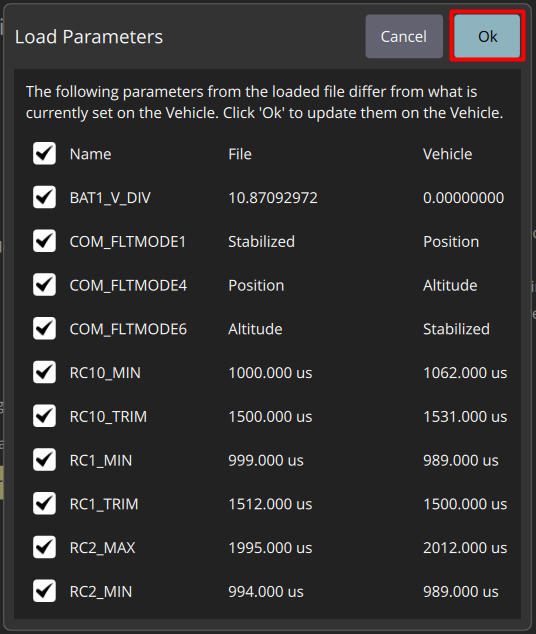
В открывшемся файле вы можете изучить заменяемые параметры из файла и нажмите Ok
Перезагрузите БВС
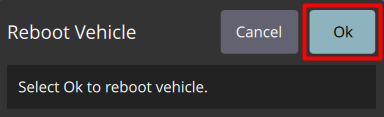
Нажмите кнопку Tools
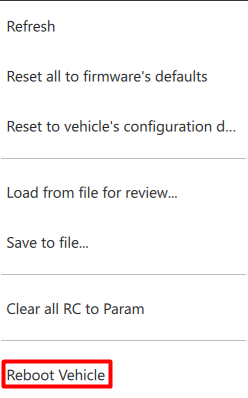
Нажмите Ok
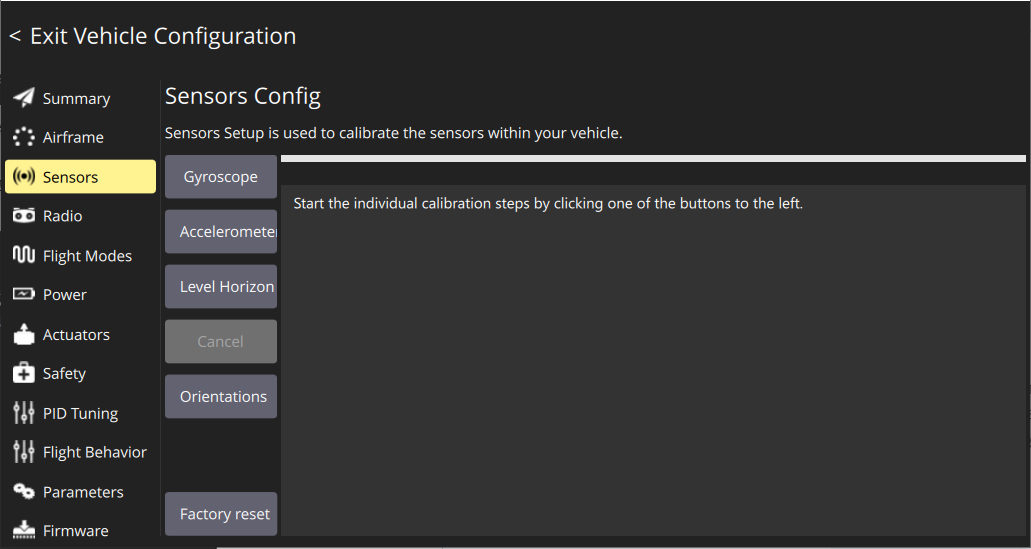
Шаг 3: Калибровка датчиков
Во вкладке Sensors находятся пункты калибровки датчиков БВС
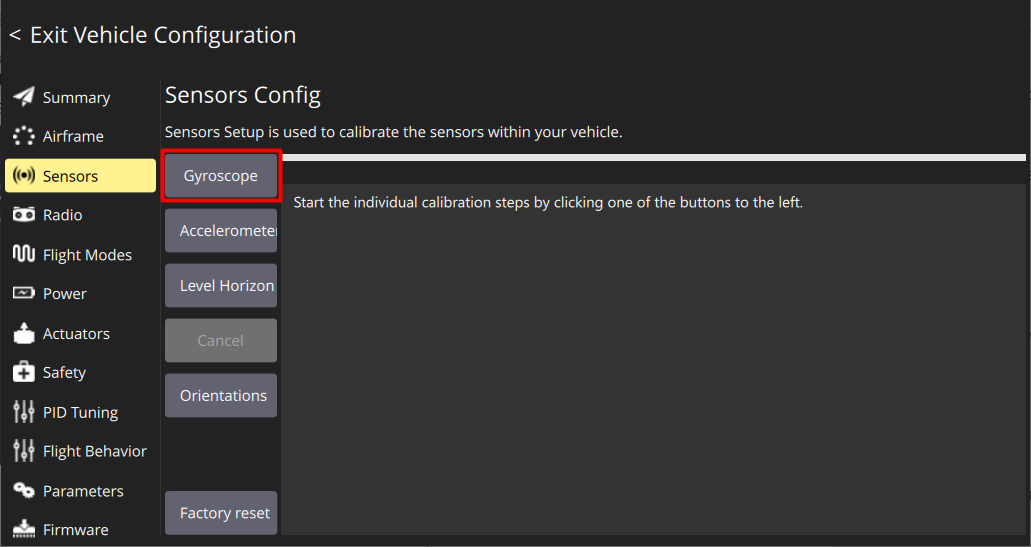
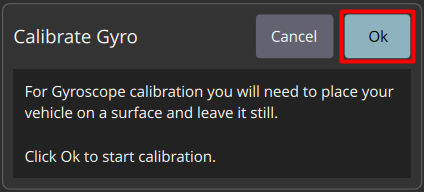
Шаг 3.1: Калибровка Гироскопа
От точности калибровки гироскопа зависит качество полета
Выберите меню Gyroscope
Установите квадрокоптер на ровную поверхность
Нажмите Ok
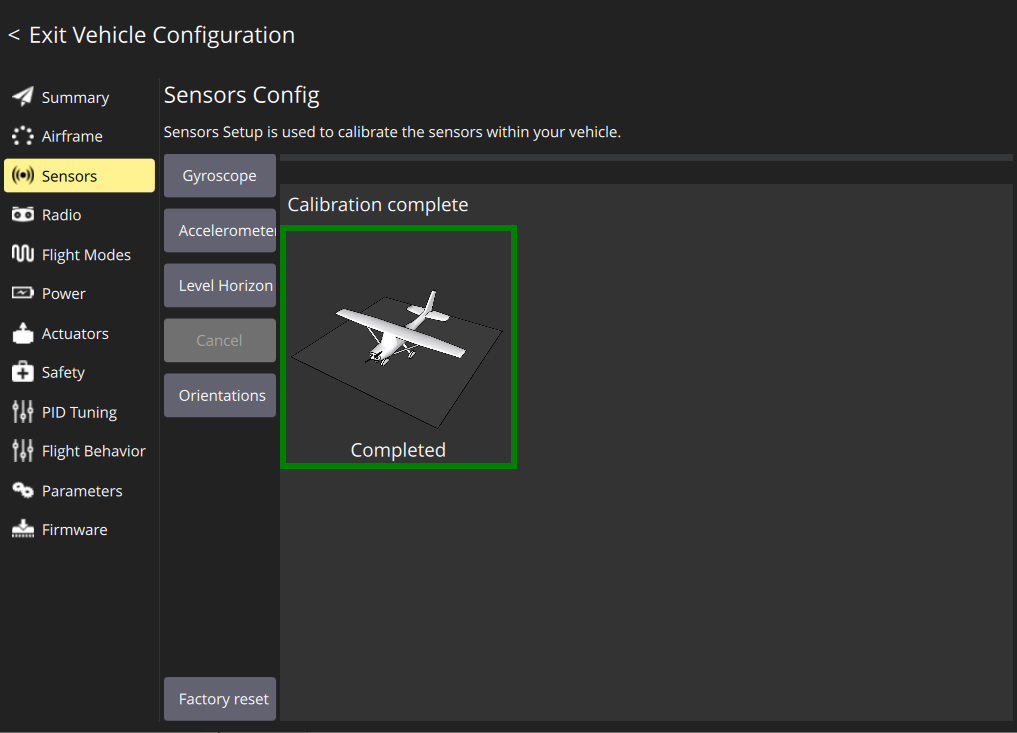
Дождитесь окончания калибровки
Если калибровка произведена успешна, то рамка самолета будет зеленой, а снизу надпись “Completed”, если при калибровке было ошибка - повторите ее заново
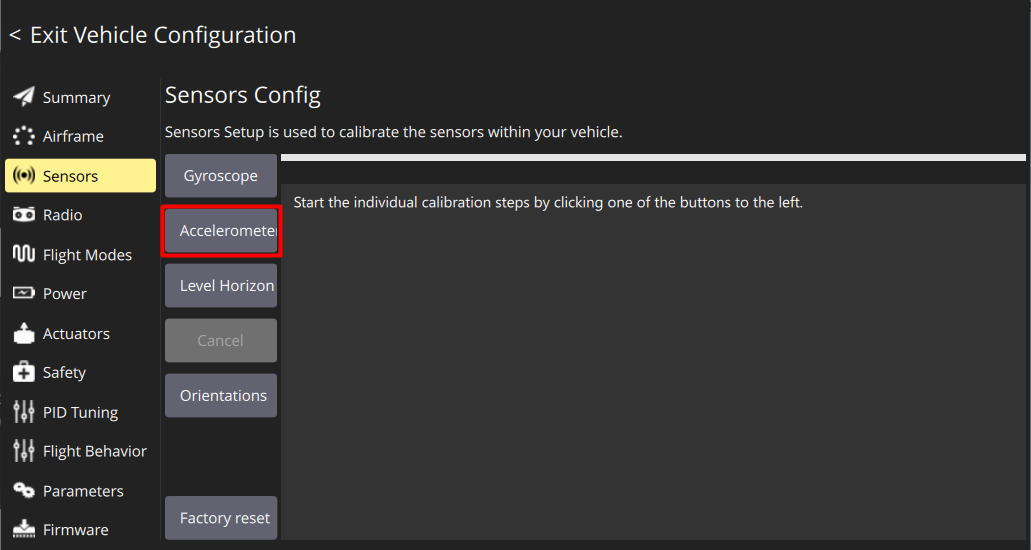
Шаг 3.2: Калибровка Акселерометра
От точности калибровки акселерометра зависит качество полета. При калибровке акселерометра необходимо устанавливать БВС в каждую из указанных ориентаций и удерживать до световой индикации
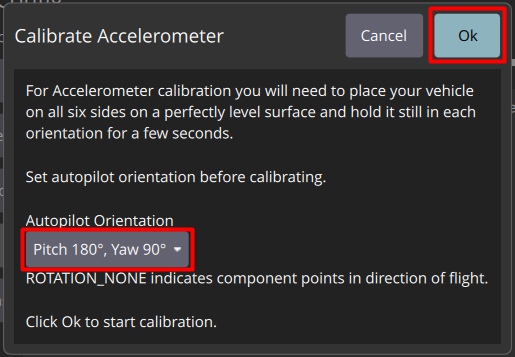
Выберите меню Accelerometer
Выберите ориентацию полетного контроллера - Autopilote Orientation с параметрами Pitch 180°, Yaw 90° и нажмите Ok
Установите БВС на шасси до появления желтой рамки
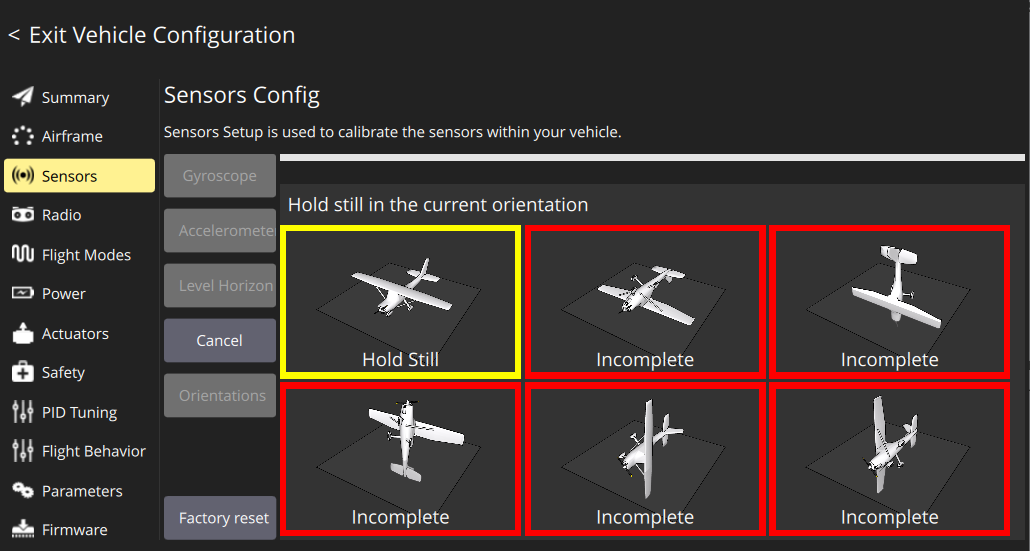
Держите БВС неподвижно до появления зеленой рамки
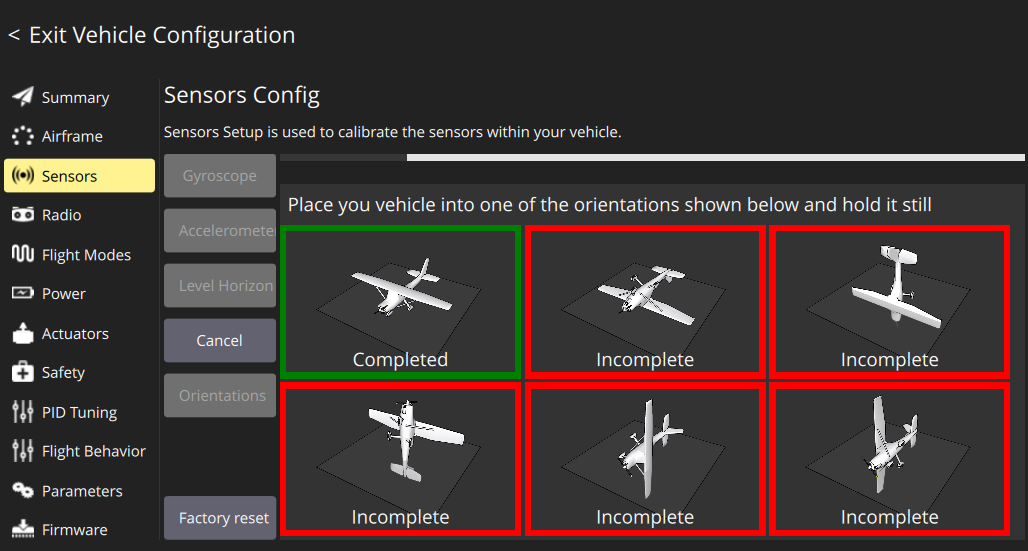
Повторите для всех положений поочередно
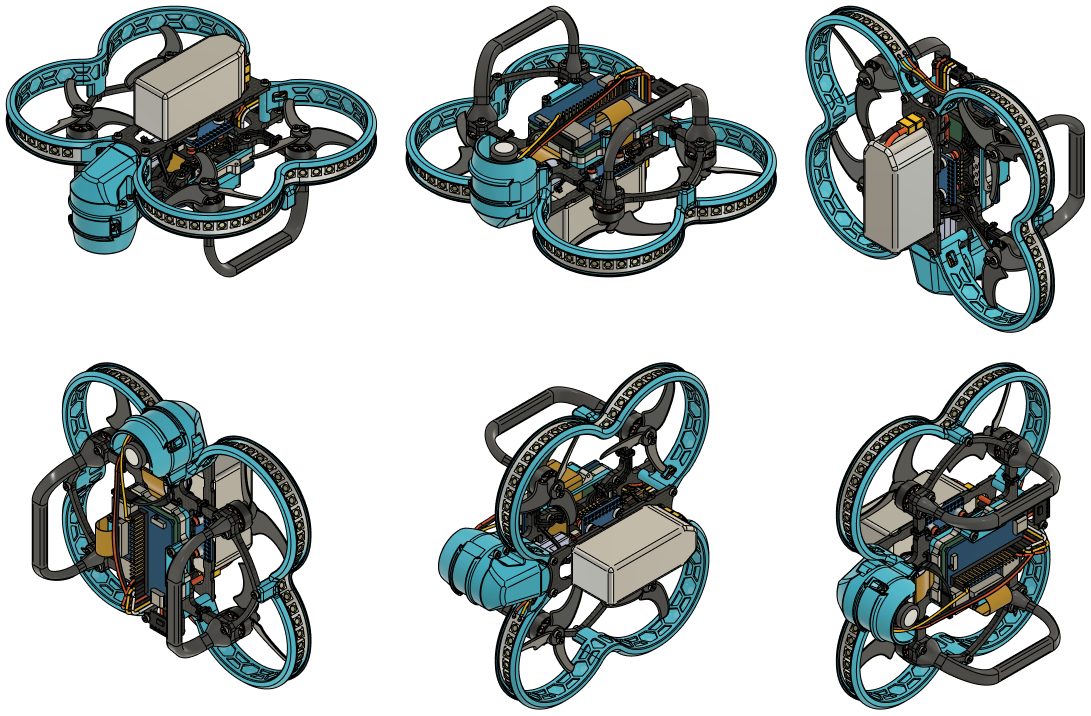
На примере Обрик:
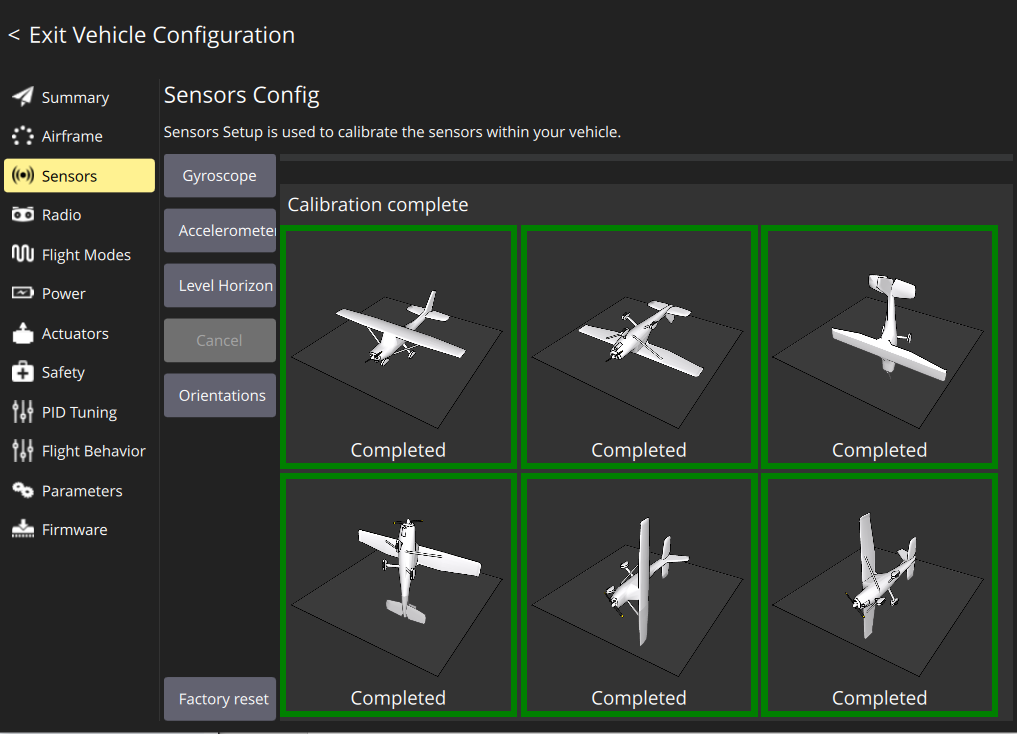
Если калибровка произведена успешна, то все 6 рамкок самолета будут зелеными, а снизу каждой будет надпись “Completed”, если при калибровке была допущена ошибка - калибровка сбросится, повторите ее заново.
Шаг 3.3: Калибровка уровня горизонта
От точности калибровки уровня горизонта зависит качество полета
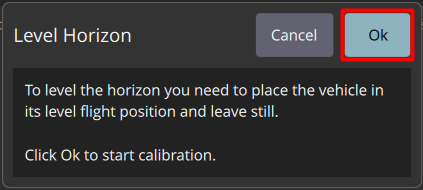
Выберите меню Level *Horizon
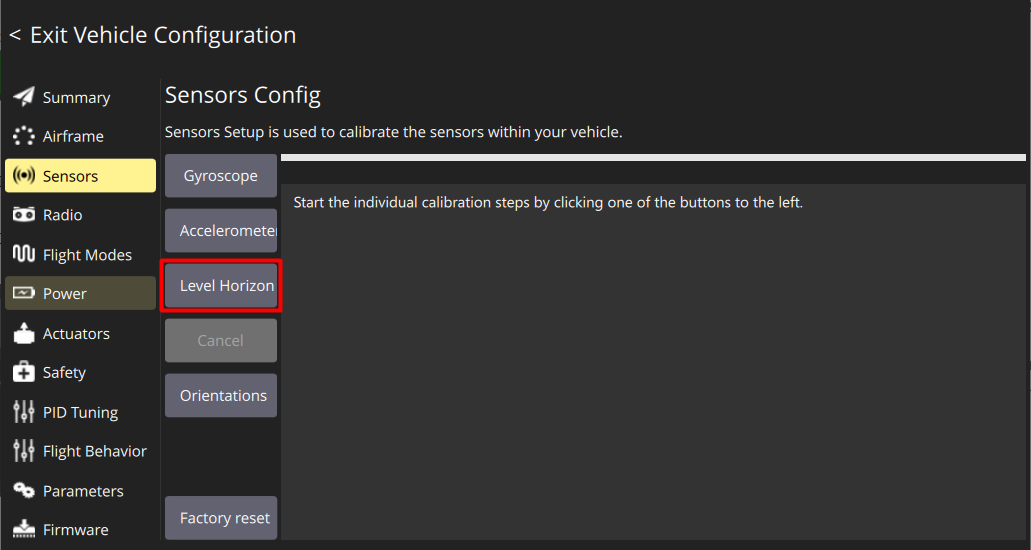
Установите квадрокоптер на ровную поверхность
Нажмите Ok
Дождитесь окончания калибровки
Шаг 4: Калибровка аппаратура управления
Перед подключением и калибровкой аппаратура управления убедитесь, что:
- К коптеру не подключено внешнее питание от АКБ
- Пропеллеры не установлены на моторах
Во вкладке Radio показывается то, как БВС воспринимает положения элементов аппаратуры управления и соотношения их с каналами (с 1 по 16)
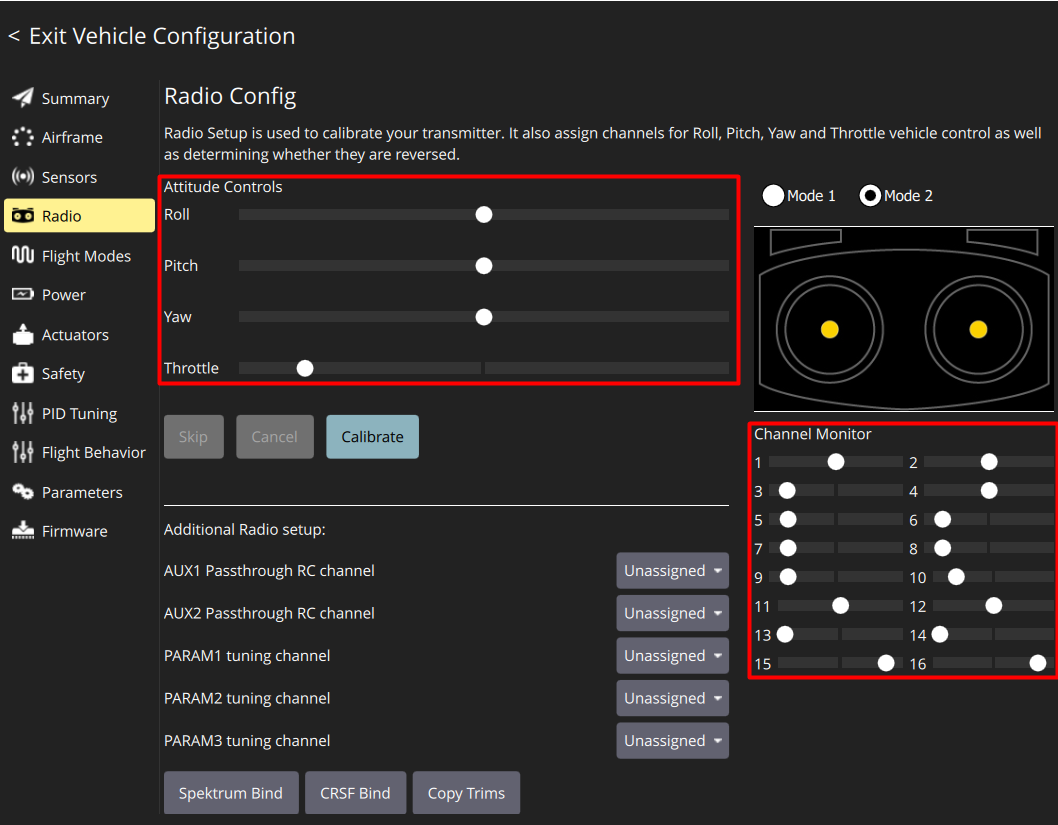
Radiomaster Pocket (аппаратура управления БВС) имеет 10 каналов и следующее соотношение:
| 1 - Roll | 2 - Pitch | 3 - Throttle | 4 - Yaw | 5 - SA |
| 6 - SB | 7 - SC | 8 - SD | 9 - SE | 10 - S1 |
Перемещая стики и изменяя положения переключателей можно в реальном времени увидеть соотношения их с каналами.
Если на аппаратуре управления индикация показывает связь с БВС, но QGC не воспринимает движения стиков, то на аппаратуре управления в меню SYS в разделе ExpressLRS измените параметр Model Match с положения off в положение on и снова в положение off.
Произведите калибровку:
Выставьте Mode 2
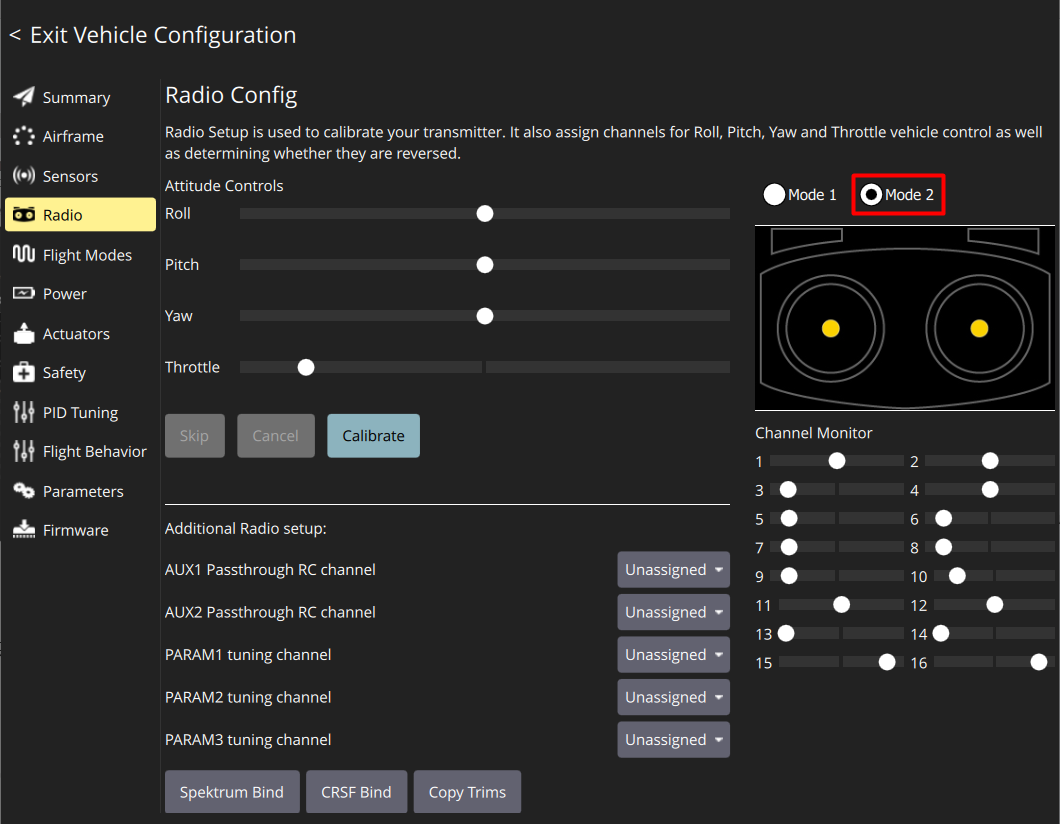
Нажмите кнопку Calibrate
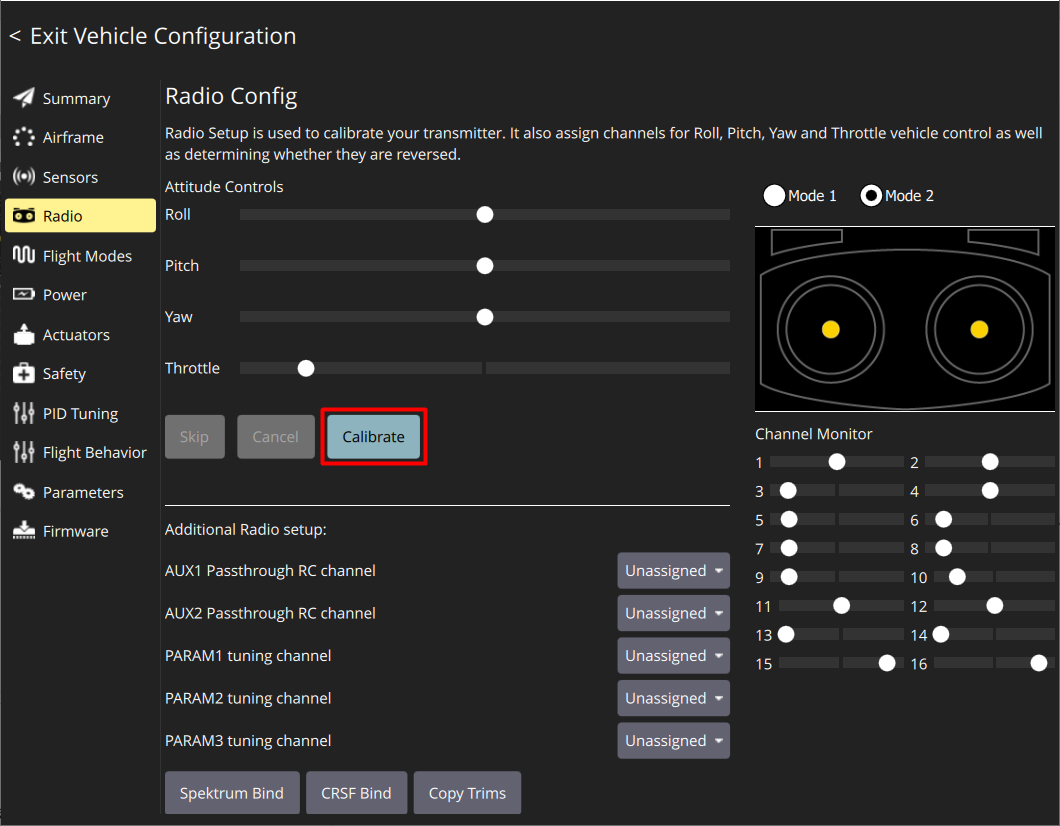
Установите триммеры Throttle, Yaw, Pitch, Roll в 0 - переместите оба стика аппаратуры управления в центральное положение
Правый стик автоматически центруется по обеим осям, чтобы установить левый стик по оси Throttle в центральное положение совместите риски на стике с рисками на корпусе
Нажмите Ok
Переведите левый стик (Throttle) в нижнее положение, как указано в окне справа и нажмите Next

Повторяйте движения стиками вслед за анимацией и читайте подсказки
Чем точнее вы будете следовать анимации, тем лучше будет произведена калибровка
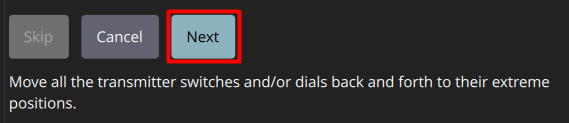
При появлении надписи "Move all transmitter switches and/or dials back and forth to their extreme positions" переключите SA, SB, SC, SD, SE, SI в их конечные положения
Нажмите Next
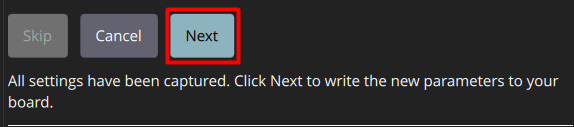
При появлении надписи "All settings have been captured. Click Next to write the new parameters to your board" нажмите Next
Шаг 5: Настройка полетных режимов
Во вкладке Flight Modes настраивается соотношение позиций переключателя SB и режимов полета, а также Arm (включение двигателей) и Kill switch (экстренное отключение двигателей)
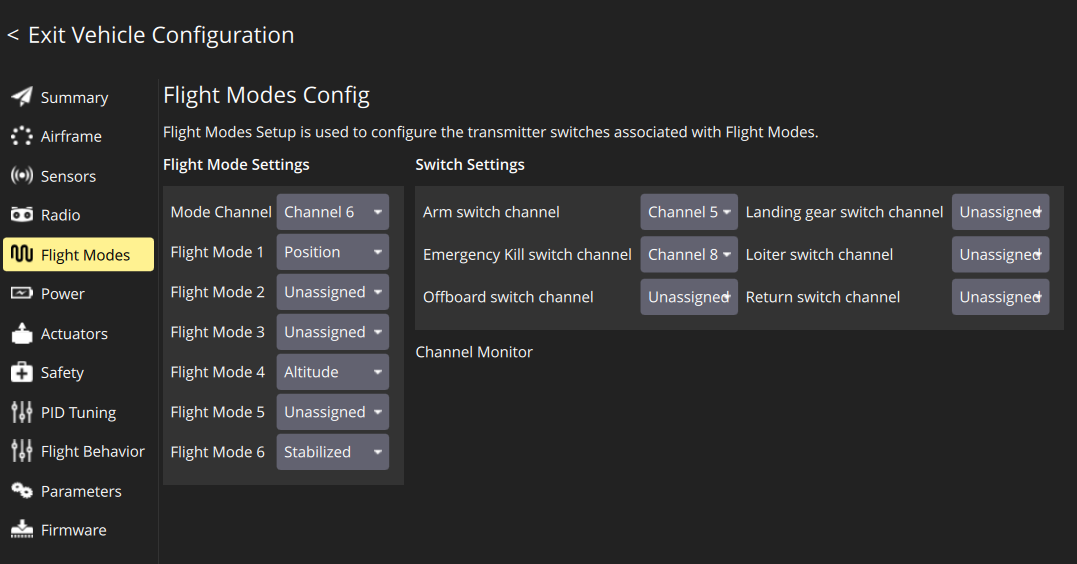
Порядок настройки полетных режимов (поле Flight Mode Settings):
- Mode Channel установите Channel 6 (переключатель SB)
- Flight Mode 1 установите Position (полет с автоматическим удержанием позиции)
- Flight Mode 4 установите Altitude (полет с автоматическим удержанием высоты)
Flight Mode 6 установите Stabilized (полет с автоматическим удержанием горизонтального положения)
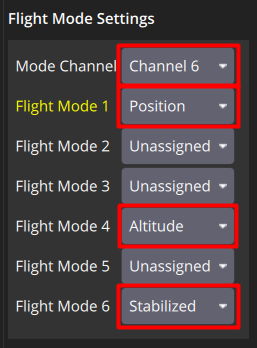
Желтым подсвечивается полетный режим (Flight Mode) который в данный момент соответствует позиции переключателя SB на аппаратуре управления
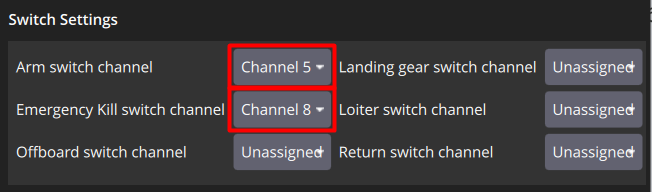
Порядок настройки переключателей (поле Switch Settings):
- Arm switch channel установите Channel 5 (переключатель SA)
Emergency Kill switch channel установите Channel 8 (переключатель SD)
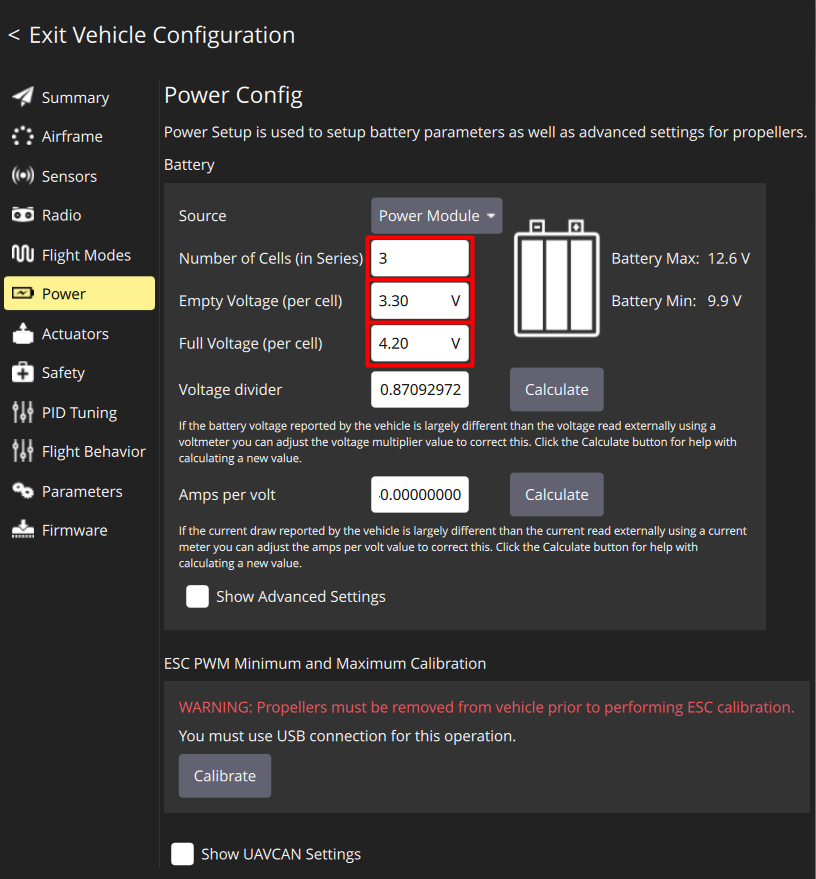
Шаг 6: Настройка питания
Перед настройкой питания убедитесь что пропеллеры не установлены на моторах
Во вкладке Power настраиваются параметры АКБ
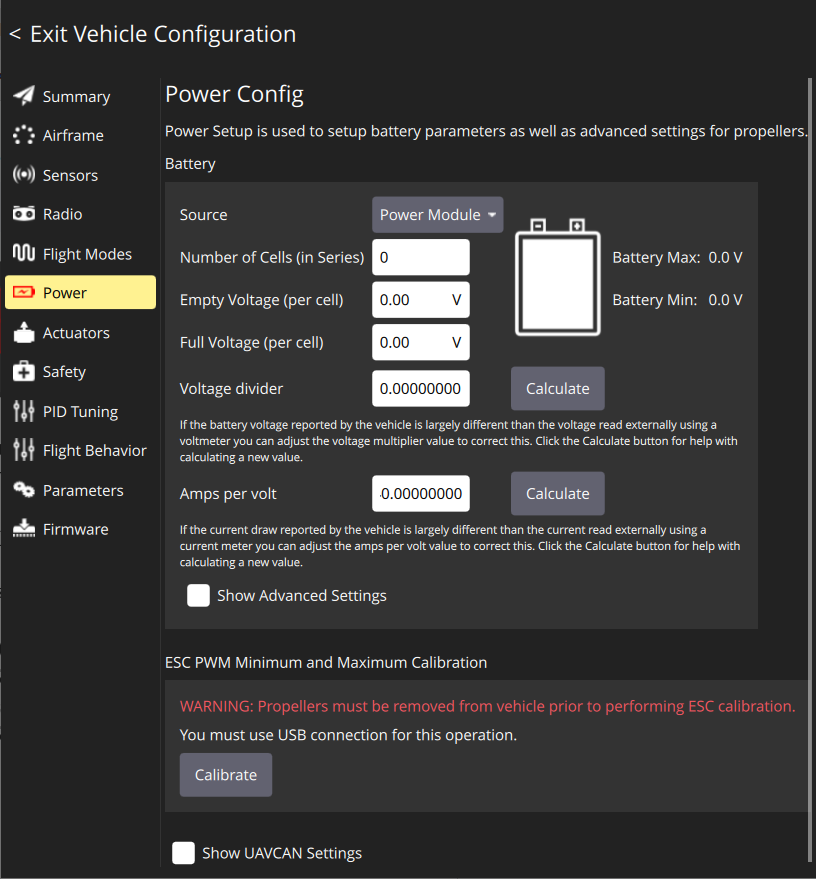
- Установите параметр Number of cells в соответствии с количеством ячеек в АКБ (3S для БВС)
- Установите параметр Empty Voltage (минимальное напряжение для ячейки АКБ) значение 3.30V (для LiPo АКБ)
Установите параметр Full Voltage (максимальное напряжение для ячейки АКБ) значение 4.20V (для LiPo АКБ)
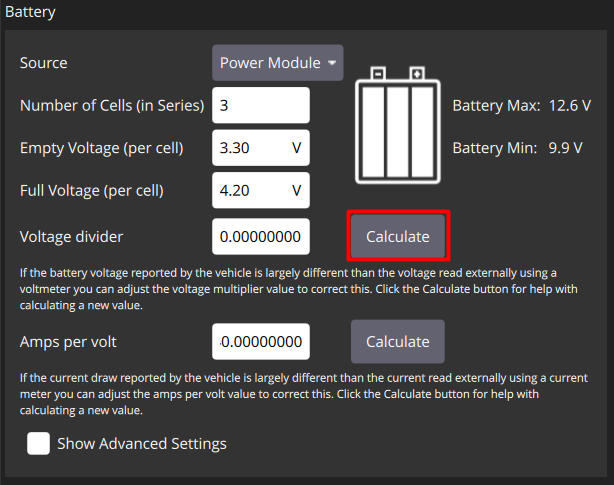
Откалибруйте делитель напряжения:
- Подключите индикатор напряжения к балансировочному разъему АКБ
Нажмите кнопку Calculate напротив надписи Voltage Divider
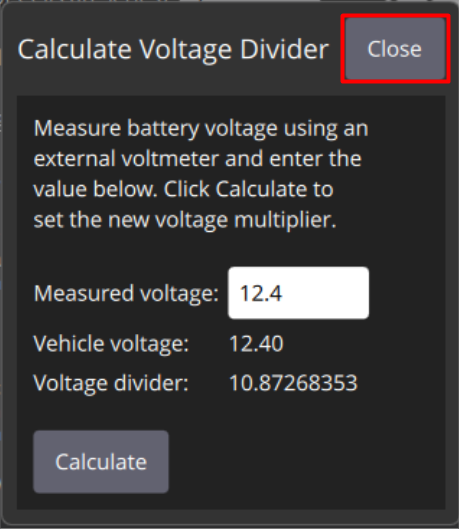
Введите в открывшемся поле суммарное значение напряжения с индикатора напряженияй
- Нажмите Close, чтобы сохранить рассчитанное значение
В случае отсутствия индикатора напряжения или невозможности ручной калибровки, установите усредненное значение делителя напряжения для комплекта БВС (Voltage divider = 11)
Проверка
После настройки и калибровки полетного контроллера перейдите на вкладку Summary. Все пункты должны быть отмечены зеленым маркером
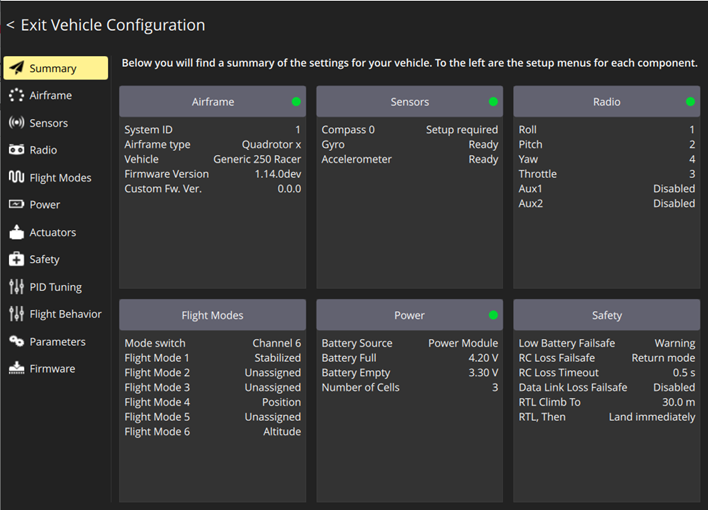
Теперь БВС готов к первому полёту
Быстрая настройка / Полная настройка параметров
Во вкладке Parameters можно загрузить из файла абсолютно все параметры для быстрого запуска БВС, после загрузки параметров необходимо будет откалибровать гироскоп, акселерометр, горизонт и радио, так как эти пункты настройки взаимодействуют с физическим состояние датчиков IMU и аппаратуры управления и могут меняться
- Загрузите файл всех параметров аналогично инструкции
- Откалибруйте гироскоп аналогично инструкции
- Откалибруйте акселерометр аналогично инструкции
- Откалибруйте уровень горизонта аналогично инструкции
- Откалибруйте радио аналогично инструкции
- После калибровки датчиков и аппаратуры управления перейдите на вкладку Summary. Все пункты должны быть отмечены зеленым маркером. Теперь БВС готов к первому полёту