Инструкция по сборке конструктора программируемого квадрокоптера «Обрик»
Этап 1: Подготовка и пайка силовых компонентов
Шаг 1. Лужение проводов двигателей
- Выпрямите провода на четырех бесколлекторных моторах, чтобы жилы не были перекручены
- Отрежьте коннектор проводов моторов вплотную к коннектору
Снимите 2-3 мм изоляции с провода

Нанесите флюс и залудите кончики всех проводов
Выпрямите оголённые провода. Никогда не перекручивайте жилы оголенного провода.
Шаг 2. Подготовка конденсатора
- Возьмите электролитический конденсатор. Определите полярность (длинная ножка — плюс)
Вставьте в отверстия на плате регулятора скорости оборотов (ESC) , зафиксируйте на 10-12 мм, соблюдая полярность

Модель конденсатора может отличаться длиной
- Согните ножки под углом 90 градусов так, чтобы конденсатор мог лечь на плату горизонтально
Шаг 3. Пайка конденсатора к ESC
- Припаяйте ножки конденсатора к регулятору скорости (ESC)
Отрежьте лишнюю длину ножек бокорезами

Залудите контактные площадки регулятора скорости оборотов (ESC)
Шаг 4. Пайка силового кабеля к ESC
- Припаяйте силовые кабели к контактным площадкам питания регулятора скорости оборотов платы (ESC)
Красный провод к плюсу (+), черный к минусу (-)

Обеспечьте качественный прогрев для надежного соединения
Наденьте термоусадку на конденсатор и усадите феном

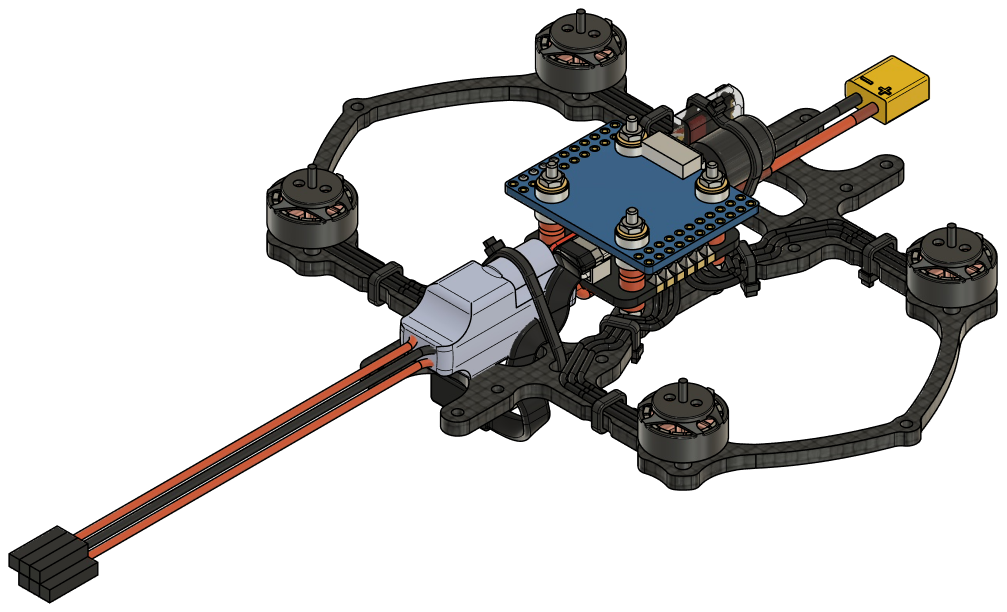
Шаг 5. Сборка силового разъема XT30
- Предварительно наденьте термоусадку на провода
- Снимите 3-4 мм изоляции с силовых проводов
- Залудите концы толстых силовых проводов (красный и черный)
- Припаяйте их к разъему XT30
Плоская грань разъема — обычно плюс, сверьтесь с маркировкой
Подвиньте термоусадки к месту пайки и усадите их феном

Следите, чтобы нагрев от фена не распаял разъём
Шаг 6. Подготовка понижающих преобразователей (UBEC)
Возьмите два понижающих преобразователя (модуля UBEC) (для питания Raspberry Pi и периферии)

Наденьте термоусадочную трубку на платы UBEC и усадите их феном, чтобы избежать короткого замыкания

Укоротите провода на входе UBEC до 25-30 мм
- Зачистите и залудите концы
Спаяйте вместе два плюсовых провода от двух модулей в один, и два минусовых в один на выход

Шаг 7. Пайка UBEC к ESC
- Припаяйте спаренные провода питания UBEC к тем же силовым площадкам на ESC, куда припаян основной кабель питания
удобнее паять с нижней стороны платы


Шаг 8. Пайка двигателей к ESC
- Припаяйте по три провода от каждого двигателя к соответствующим тройкам контактных площадок по углам платы ESC
Порядок проводов внутри тройки не важен (направление вращения меняется программно)

Шаг 9. Завершение подготовки ESC
- Используя зубную щетку и средство Flux-OFF (или спирт), тщательно смойте остатки флюса с мест пайки на ESC
- Соберите восьмиконтактный кабель: вставьте провода в адаптер
Закрутите и вставьте восьмиконтактный кабель в коннектор регулятора скорости

Установите красные резиновые втулки в отверстия регулятора скорости оборотов

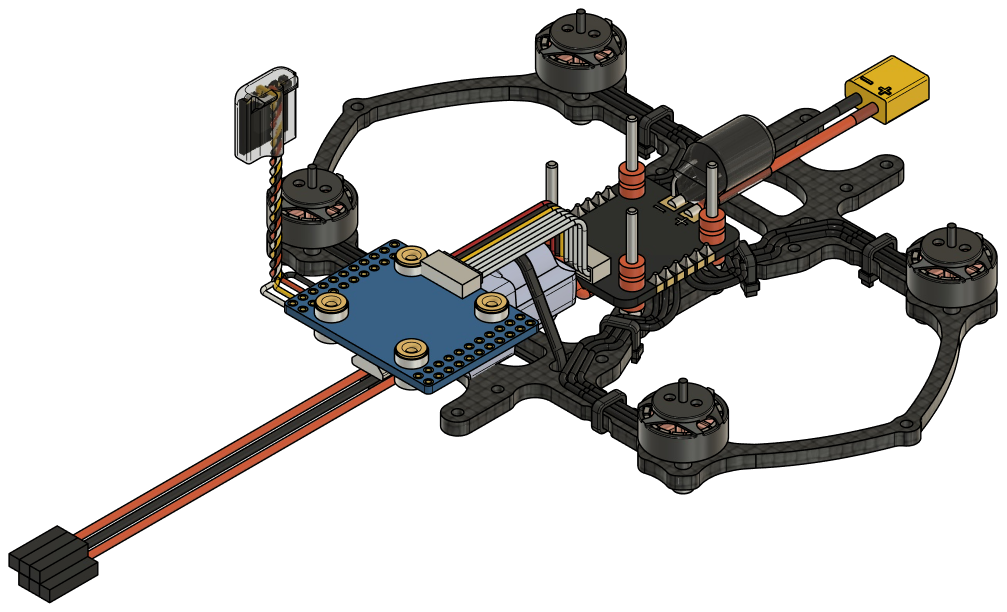
Этап 2: Подготовка электроники управления
Шаг 10. Подготовка радиоприемника управления
Припаяйте четыре провода (GND, 5V, RX, TX) к радиоприемнику

Скрутите провода в жгут
Наденьте прозрачную термоусадку на приемник и нагрейте феном

Припаяйте провода приемника к полётному контроллеру соответственно:
- GND - G (черный)
- 5V - 4V5 (красный)
- TX - RX6 (жёлтый)
- RX - TX6 (белый)
По стандарту UART всегда идет соединение TX→RX, а RX→TX

Установите радиатор на микроконроллер
Установите прозрачные резиновые втулки в отверстия полётного контроллера, затем - металлические вутлки

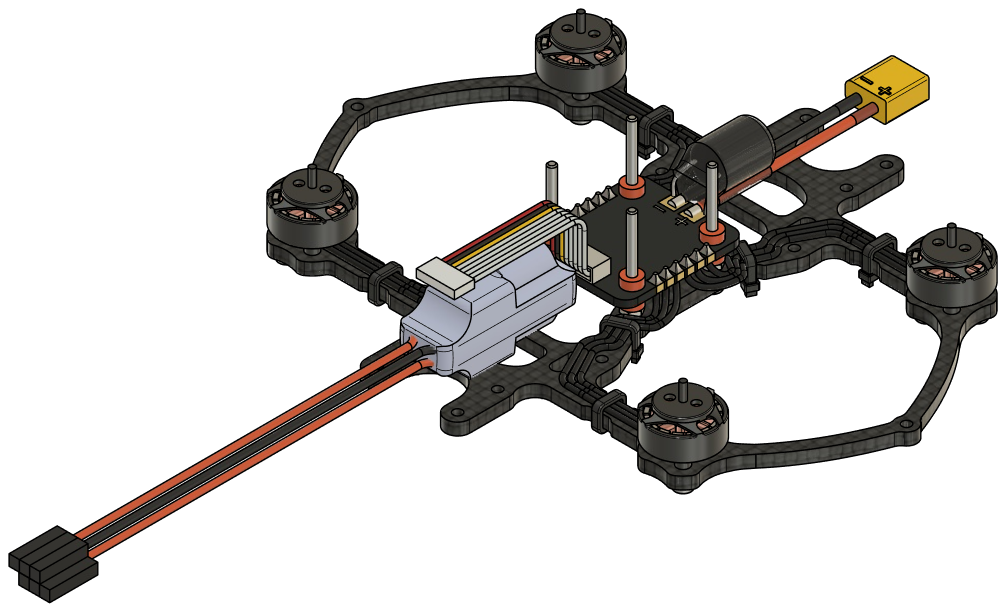
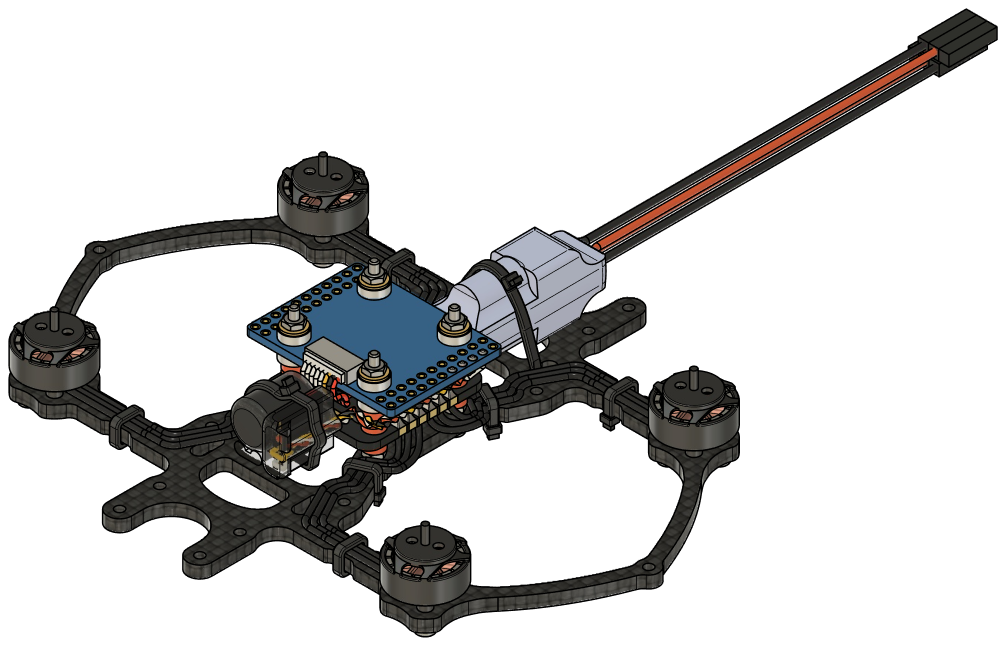
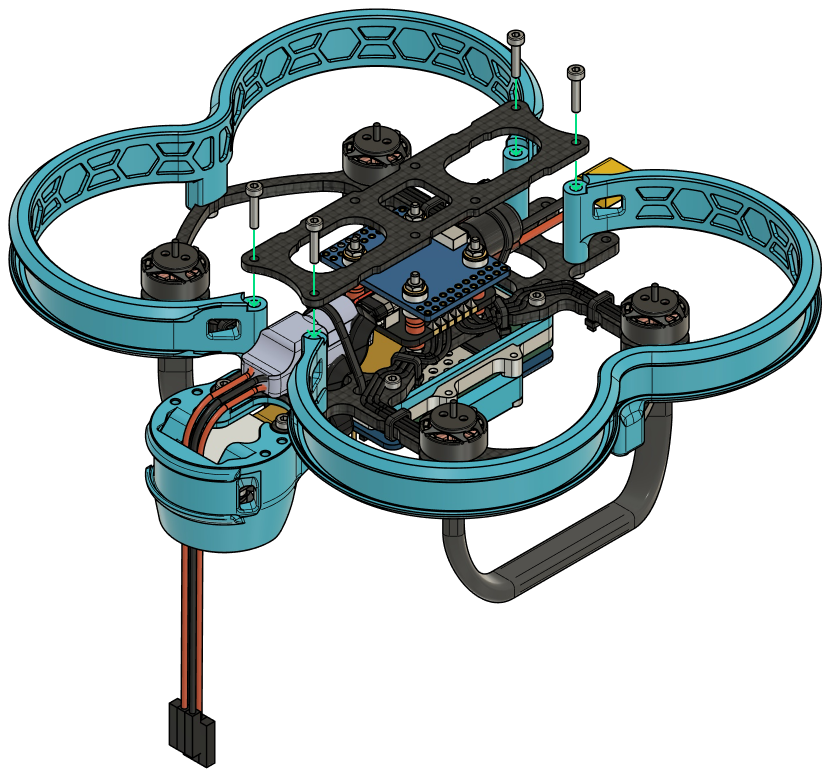
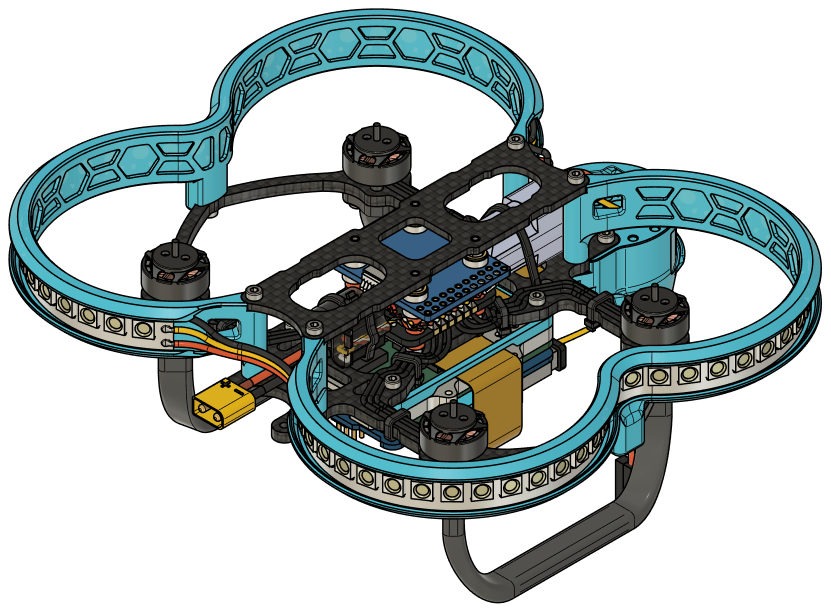
Этап 3: Сборка нижней рамы и установка собранного стека
Шаг 11. Установка регулятора скорости
Вставьте в нижнюю раму в центральные 4 отверстия болты M2x25 и закрепите их винтами M2

Установите регулятор скорости оборотов на эти болты
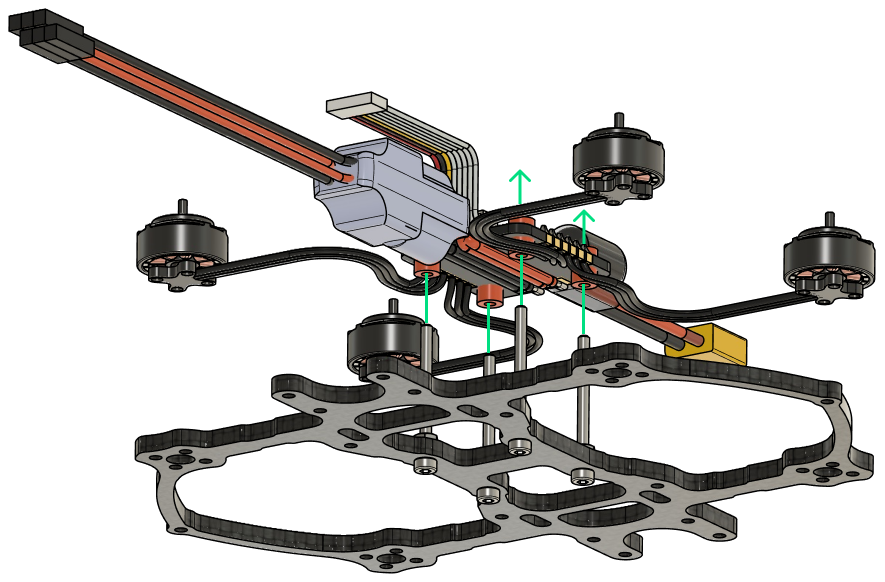
Провода понижающих преобразователей проходит под регулятором скорости оборотов и оказываются на противоположной стороне от конденсатора
Шаг 12. Установка моторов
Закрутите моторы на “лучах” рамы на винты M2x5, по два винта на мотор
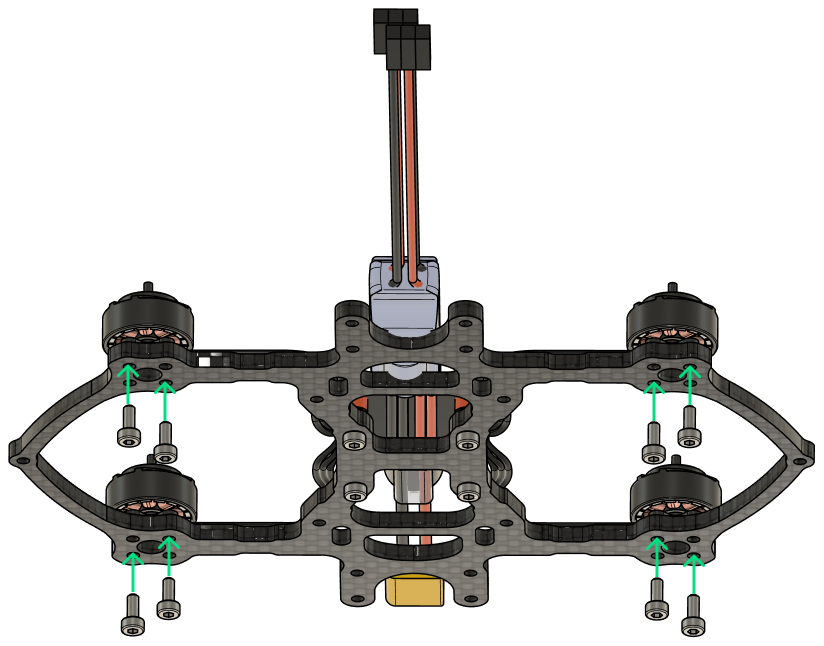
Закрепите провода моторов по одной стяжки на “луч” и через центральные разъёмы рамы - всего 8 * стяжек, отрезать излишки
Хвостики стяжки должны смотреть вниз
Зафиксируйте понижающие преобразователи стяжкой через специальные технологические отверстия рамы вместе, отрежьте излишки
Хвостиком вверх
Установите последовательно на ранее установленные болты M2x25 силиконовые проставки
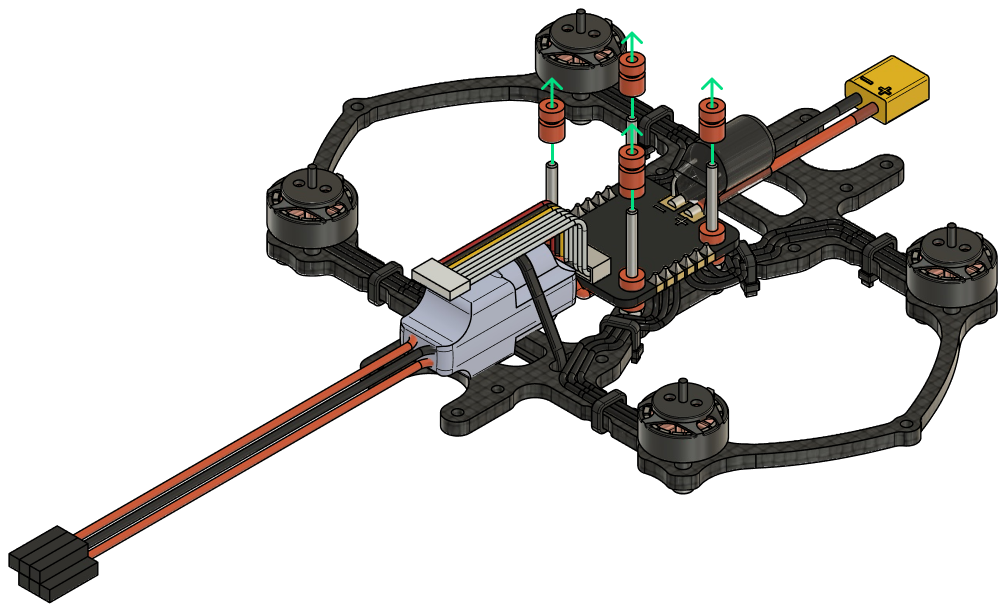
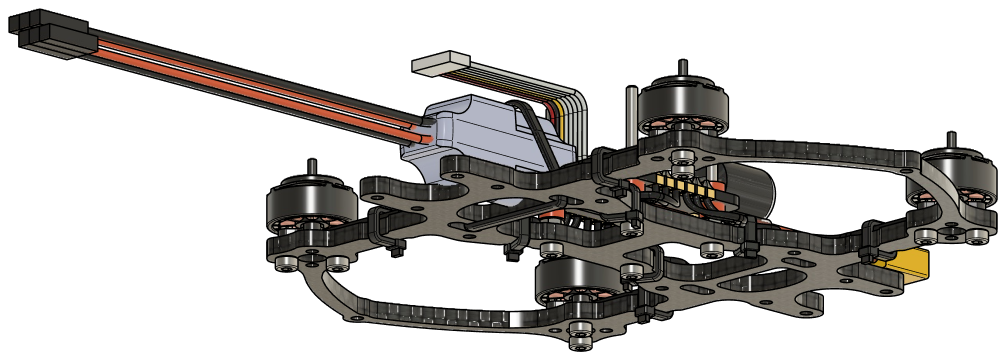
Шаг 13. Монтаж регулятора скорости оборотов
Подключите восьмиконтактный кабель из регулятора скорости оборотов в полетный контроллер
Установите полётный контроллер, таким образом, чтоб восьмиконтактный кабель проходил между платами
Разъем полётного контроллера для восьмиконтактного кабеля смотрит в сторону конденсатора
Закрутите болты M2x25 винтами M2
Зафиксируйте приёмник за конденсатор контроллера регулятора полетов стяжкой
Шаг 14. Установка SD карты и подключение USB
- Установите SD-карту 16GB в полётный контроллер
Установите провод microUSB - USB через отверстие нижней рамы в полетный контроллер
Можно проверить правильность собранной электрической схемы подключением мультиметра
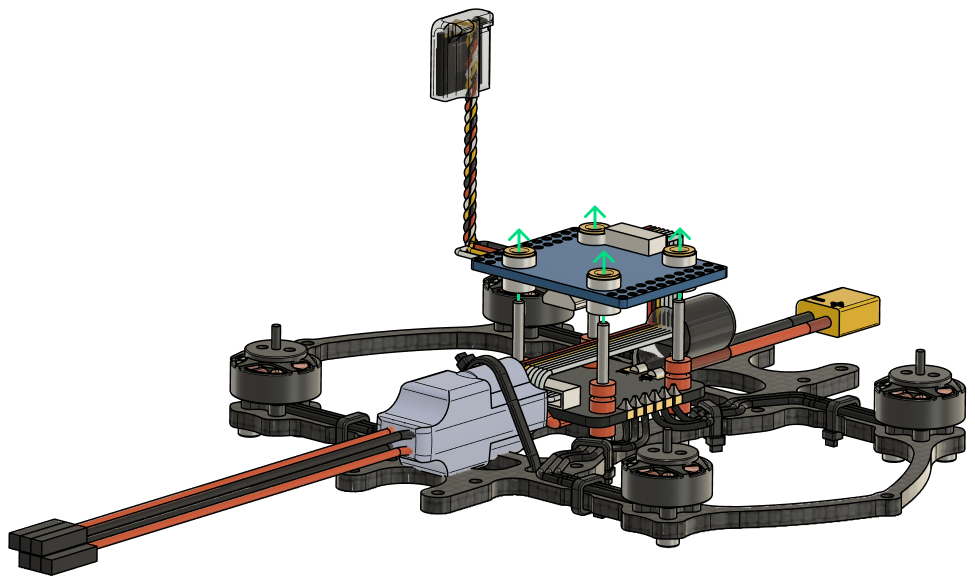
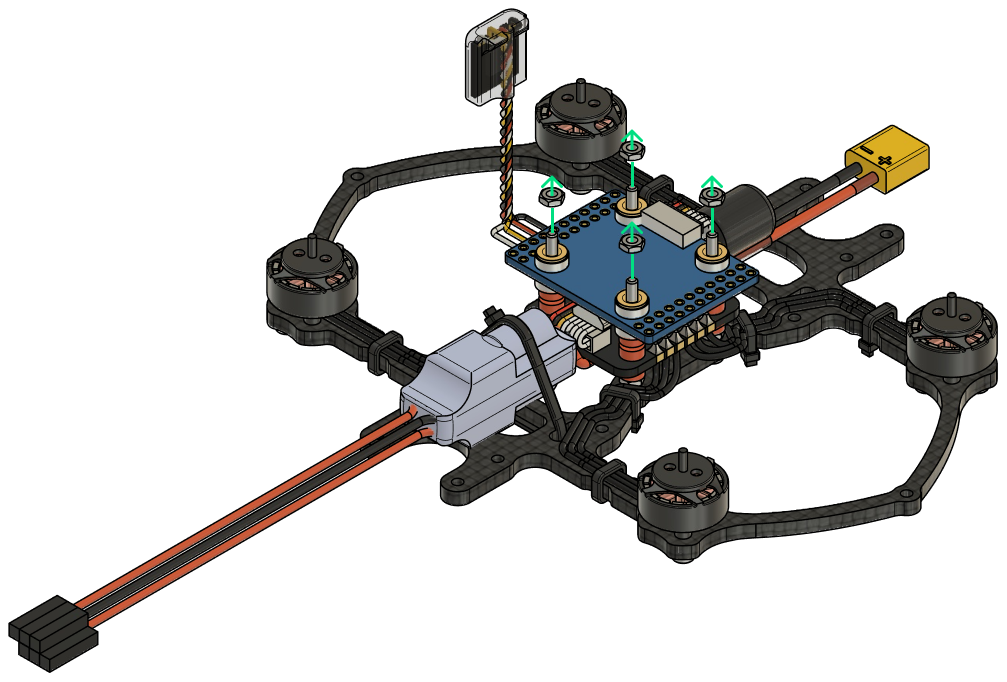
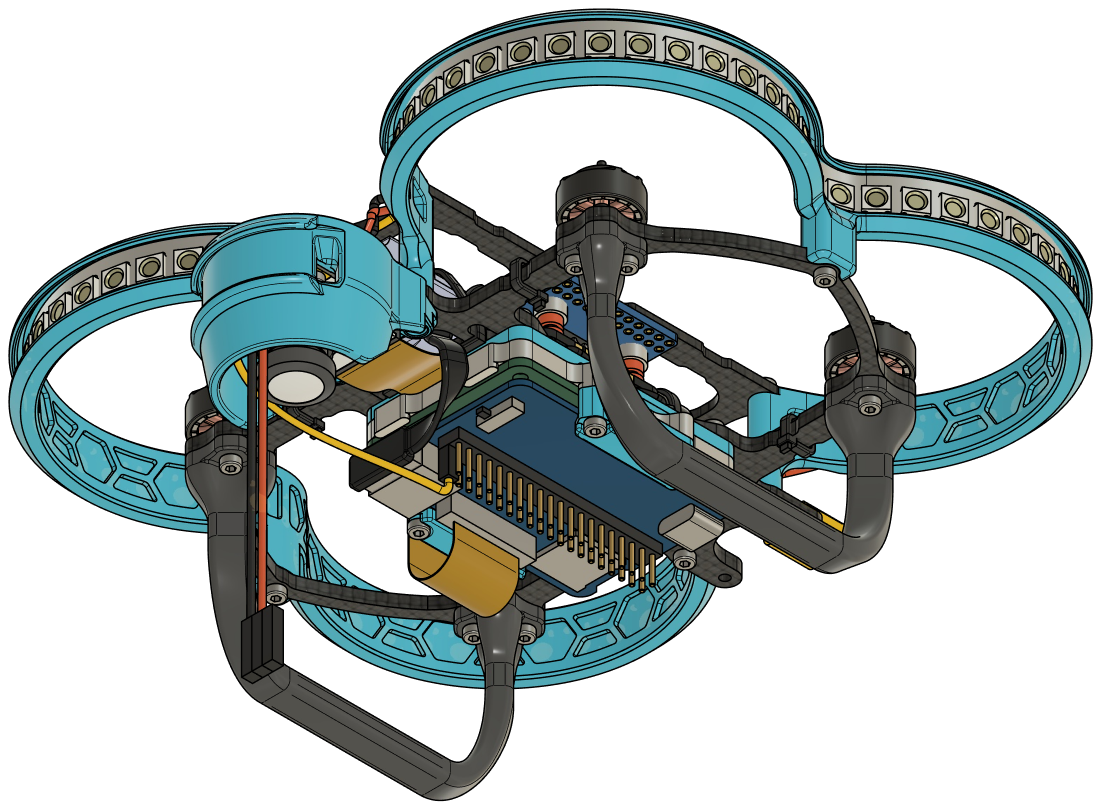
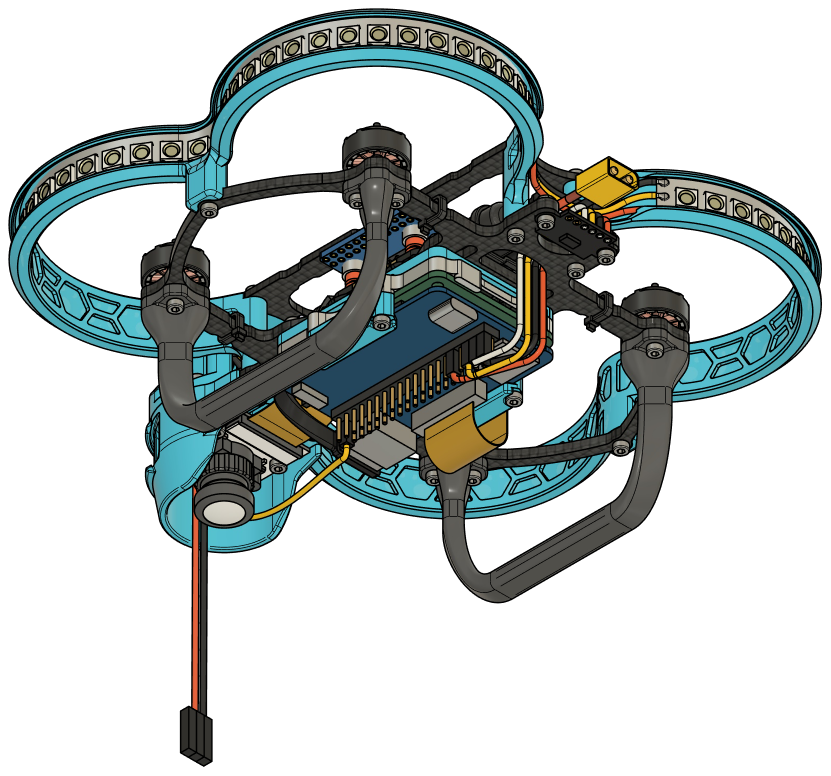
Этап 4: Установка микрокомпьютера
Шаг 15. Подготовка плат
Вставьте в материнскую плату коннектор-гребенку(2*20 пинов) и припаяйте с обратной стороны платы

Соедините Raspberry Pi с материнской платой

Следите за контактными площадками
Нанесите термопасту на процессор и оперативную память Raspberry Pi

Для хорошего термоконтакта с радиатором
Шаг 16. Сбор компьютерного модуля
Установите конструкцию в рамку радиатора и прижимы болтами M2x10

Затяните болты, но не до конца, чтоб не повредить
Установите г-образный шлейф камеры:

Шлейф камеры вставляется в разъем Raspberry Pi контактами наружу, затем загните шлейф под радиатор
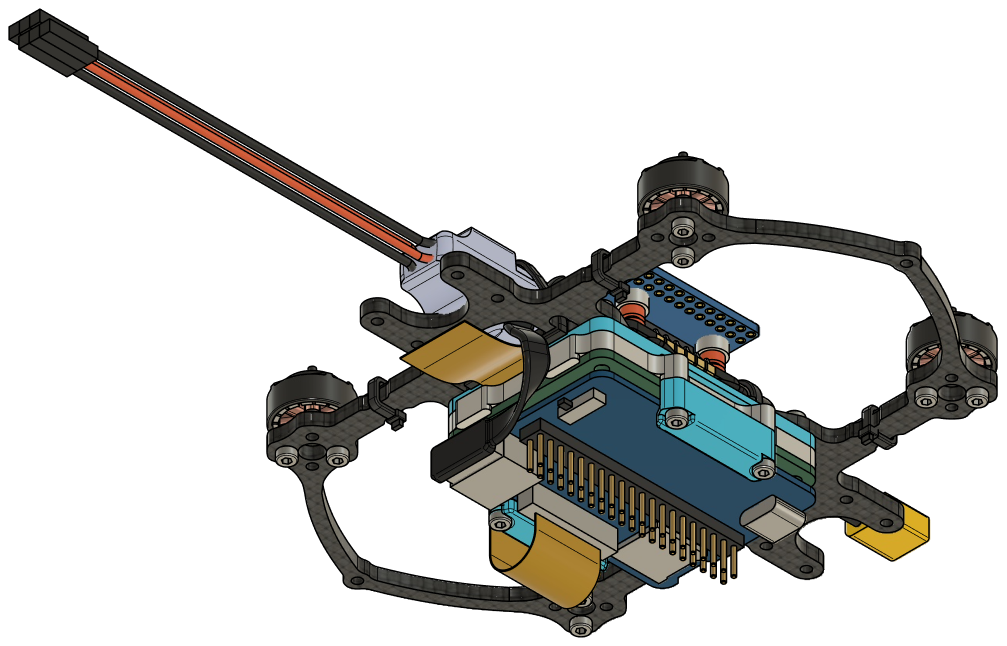
Шаг 17. Монтаж компьютерного модуля
Устанавите под нижнюю раму вместе с проставкой и зафиксируйте 4мя болтами M2x10 через нижнюю раму
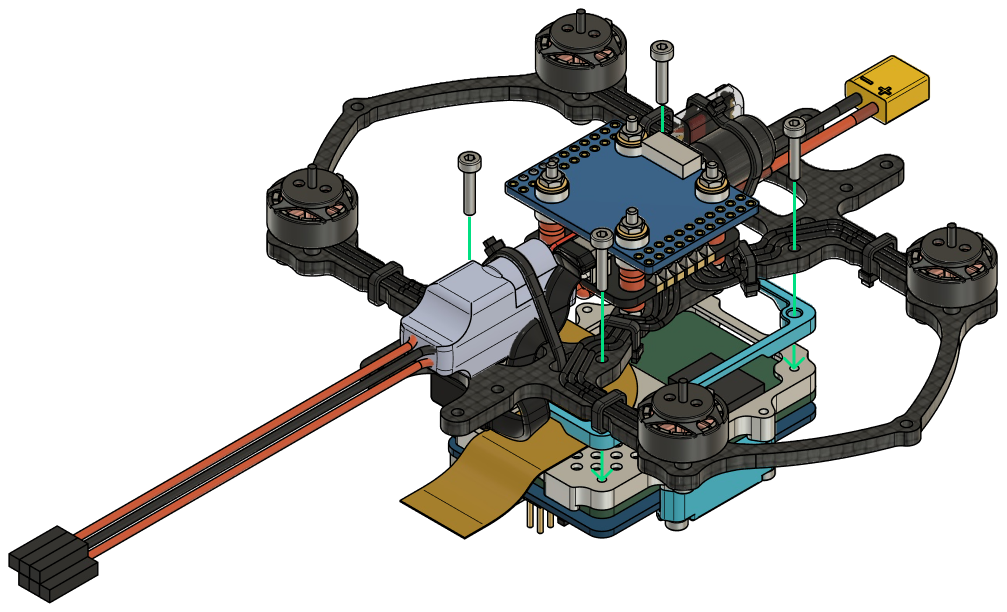
Шлейф выходит с той же стороны, что и конденсатор, выемки проставки должны смотреть на радиатор
Подключите провод USB к Raspberry Pi
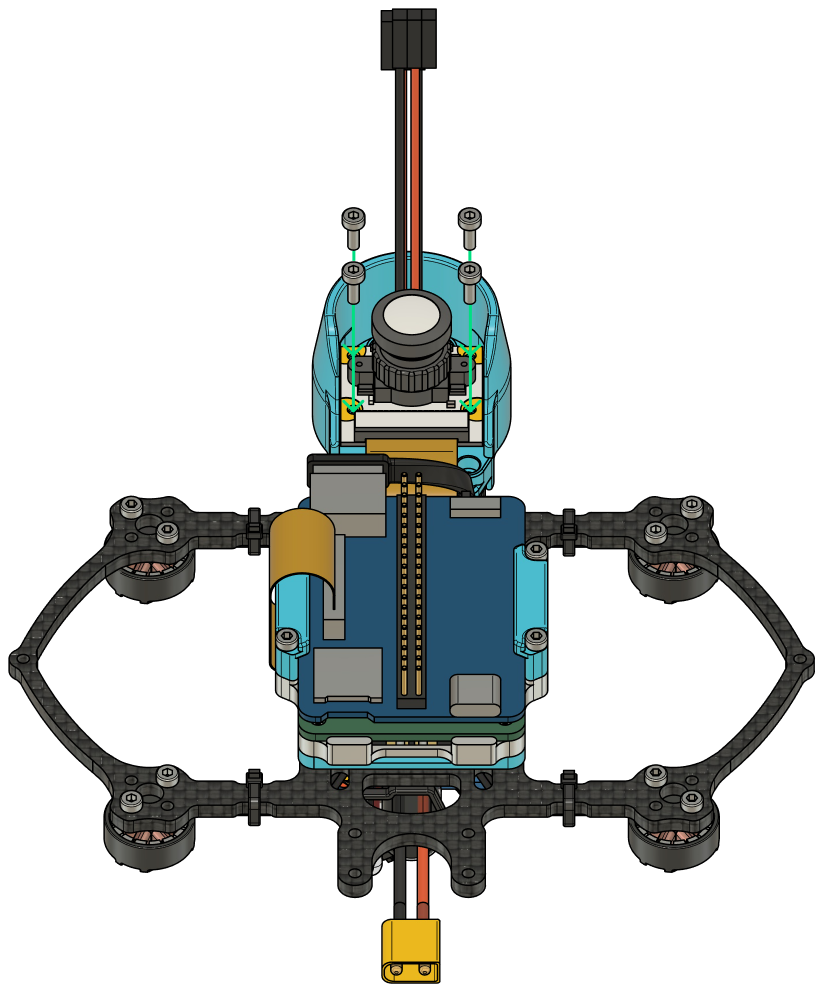
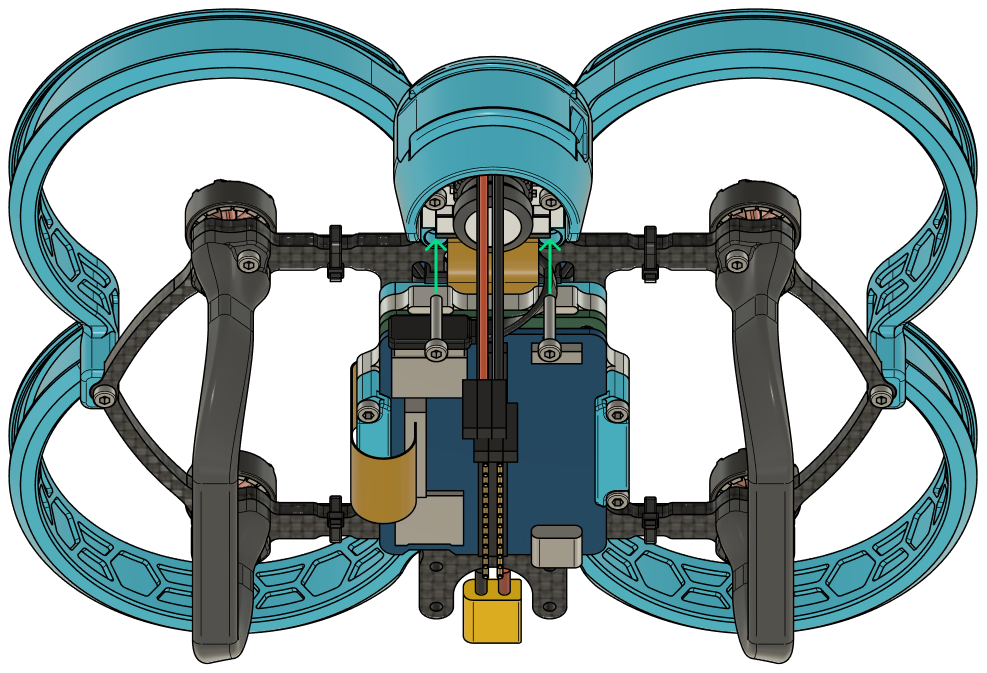
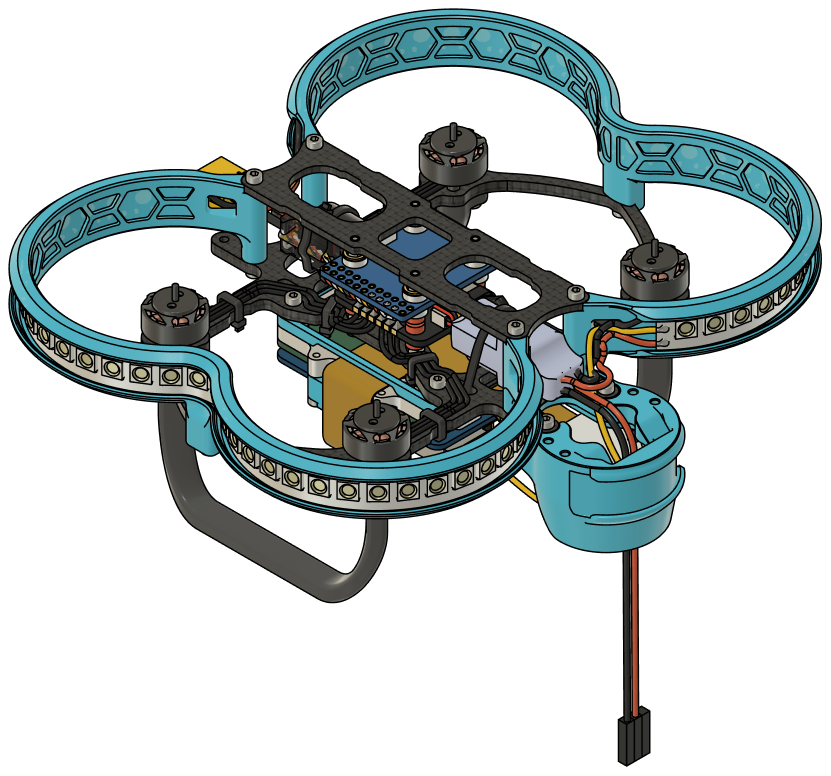
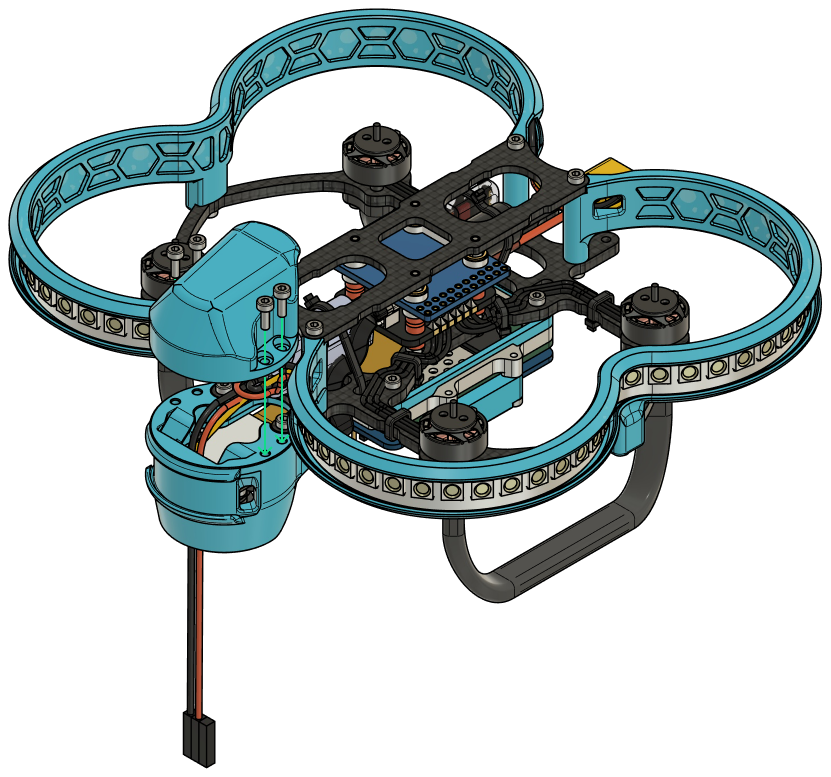
Этап 5. Установка камеры
Шаг 18. Установка модуля
Установите корпус камеры на раму и закрутите болтами M2x6
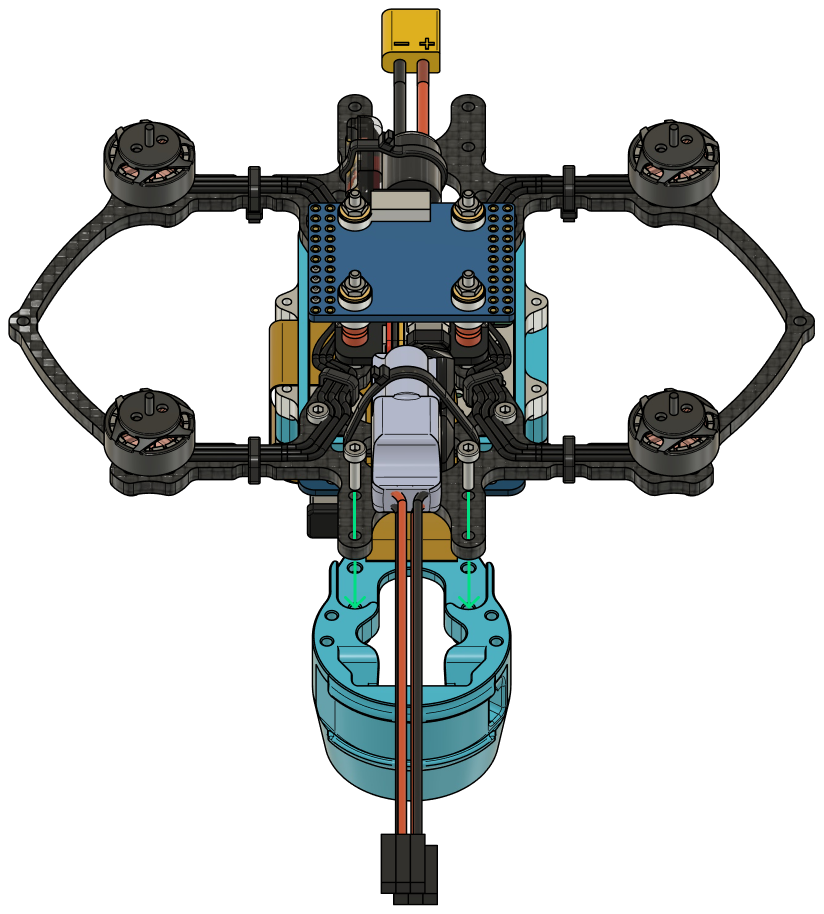
Корпус камеры устанавливается со стороны понижающих преобразователей, закручивайте болты с небольшим усилием
Шаг 19. Подключение проводов
Провода понижающих преобразователей проденьте через корпус камеры

Шлейф в разъем камеры и с помощью 4х болтов M2x6 закрепите камеру внутри её модуля
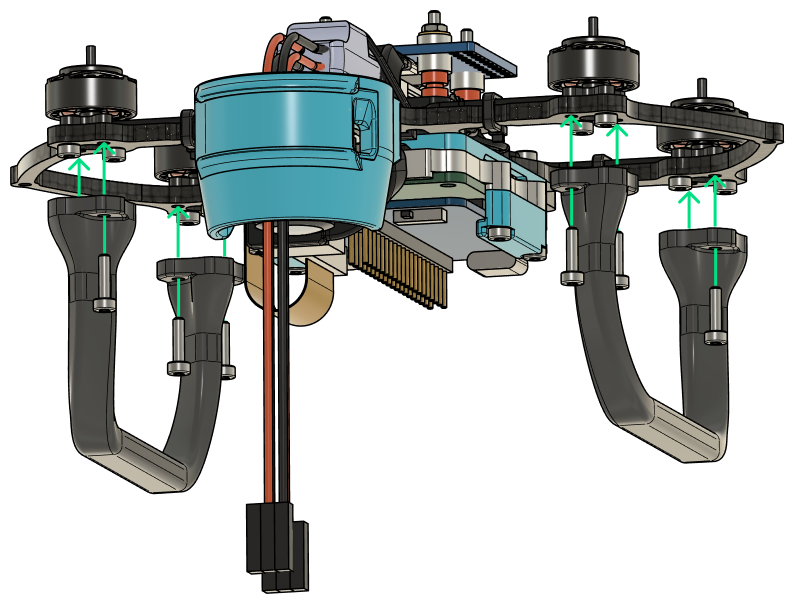
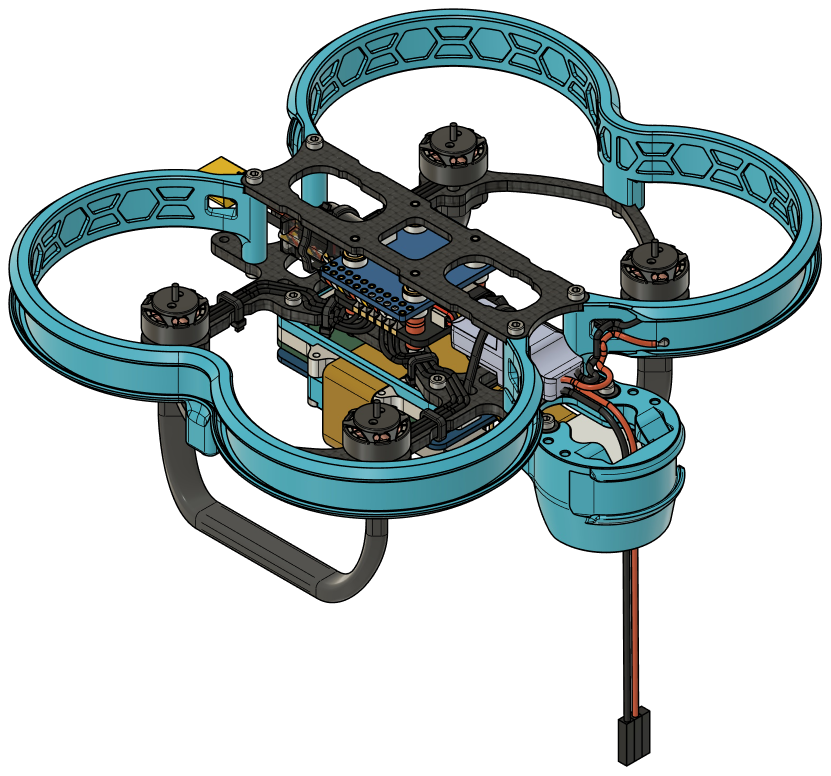
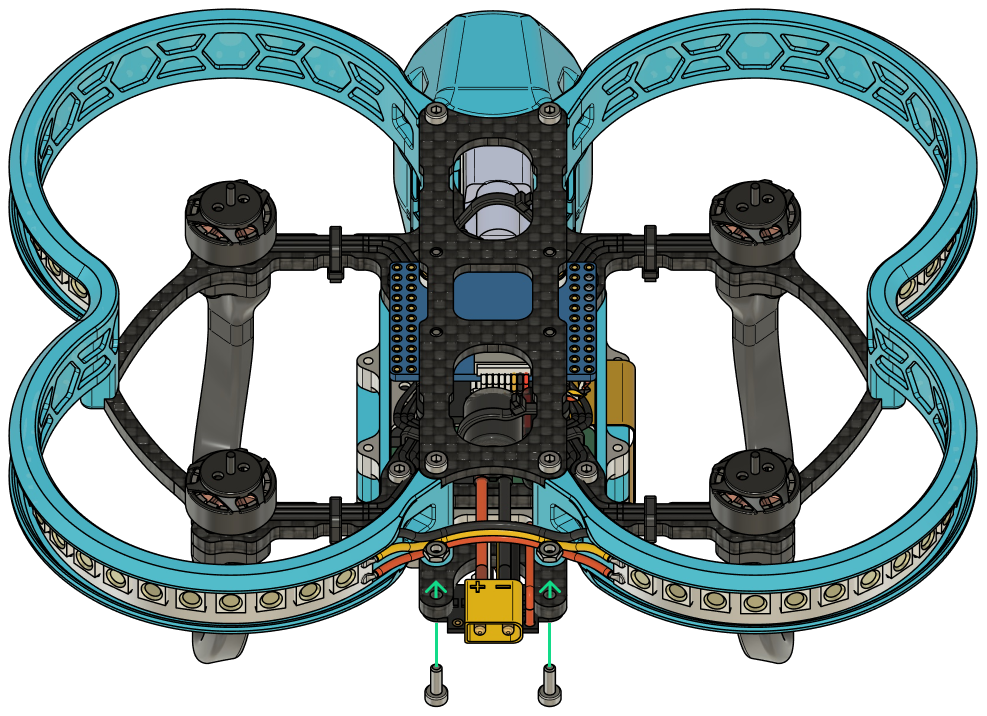
Этап 6. Сборка защит
Шаг 20. Установка ножек
Установите ножки на 8 болтов M2х8 на концах лучей нижней рамы: по два болта на одно место соединения ножки
Шаг 21. Установка защит
Закрутите два болта M2х8 между “лучей” рамы
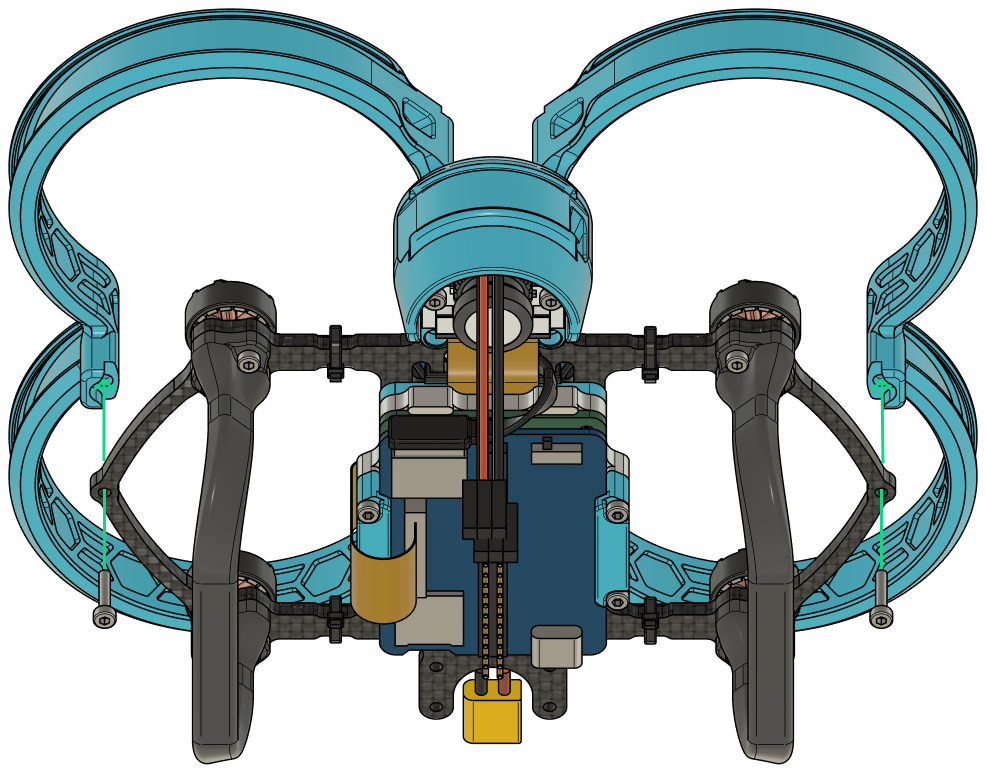
Закрутите два болта M2х12 через модуль камеры и нижней рамы в ножку защиты
Закрутите два болта M2х10 с противоположной стороны через нижнюю раму
Закрутите верхнюю деку в защиту 4 болтами M2x8
Шаг 22. Подключение RGB-ленты
Обрежьте провода не подключенного понижающего преобразователя (так, чтобы осталось 8 см)
Скрутите два провода вместе и зачистите концы
Припаяйте два куска RGB-ленты между собой через провода (они примерно по 14,2 см). Припаяйте провод длиной ~10 см с разъемом “мама” к контакту * RGB-ленты

Соблюдите направление ленты
Проведите RGB-ленту через канал защиты и припаяйте провода не подключенного понижающего преобразователя к RGB-ленте
Подключите к разъёму гребенки
Шаг 23. Установка крышки камеры
Закрепите верхнюю крышку дрона на 2 болта M2x6
Туда можно установить любой датчик для кастомных проектов
Заключительный этап
Шаг 24. Установка датчика расстояния
Зачистите и припаяйте 4 провода типа Dupont по ~4 см в датчику расстояния

Закрепите датчик расстояния снизу материнской платы двумя болтами M2x6 и двумя гайками M2
Подключите к пинам гребенке материнской платы
Нанесите клей t700 на контактную площадку датчика расстояния для надёжности
Шаг 25. Установка пропеллеров
Установите 4 пропеллера на моторы на 8 болтов M2x8: по 2 болта на пропеллера
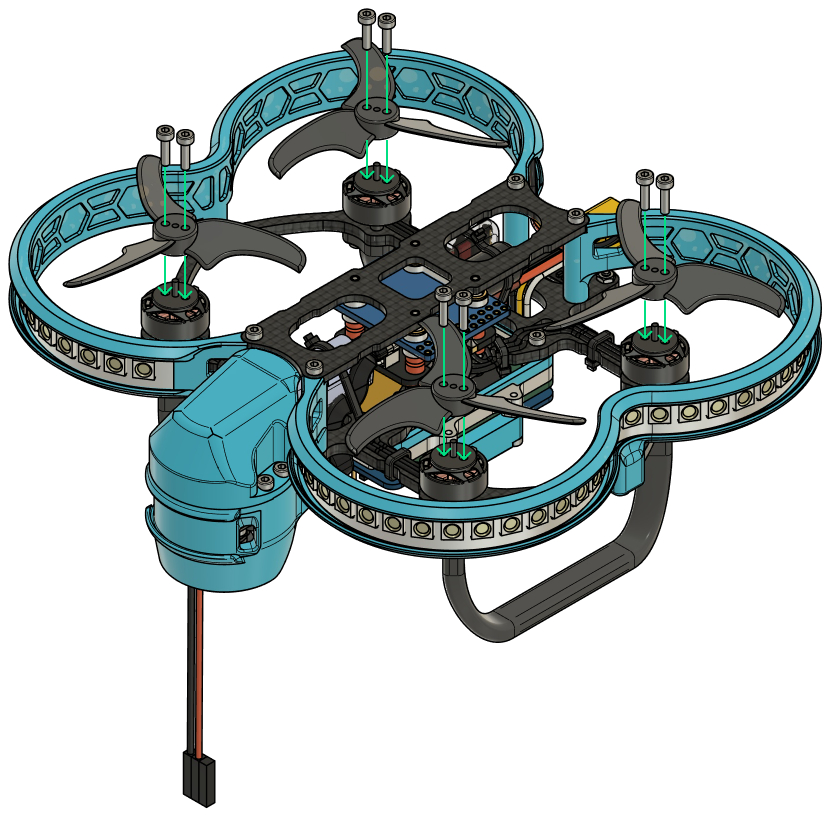
При установке ориентируетесь по оси дроны так, чтобы они закручивались внутрь
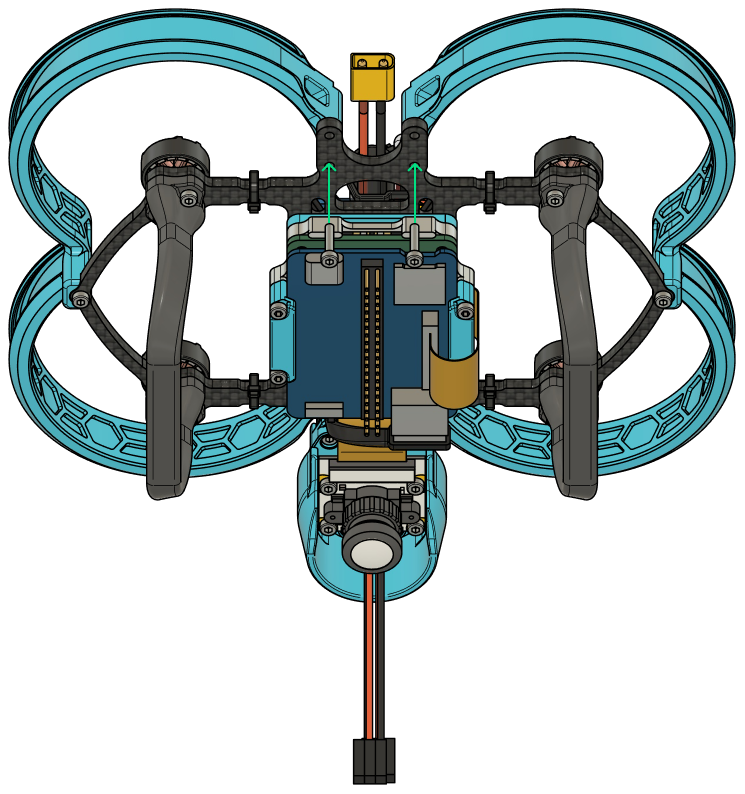
Финальный шаг - Питание
Подключите оставшиеся провода UBEC к пинам гребенки материнской платы
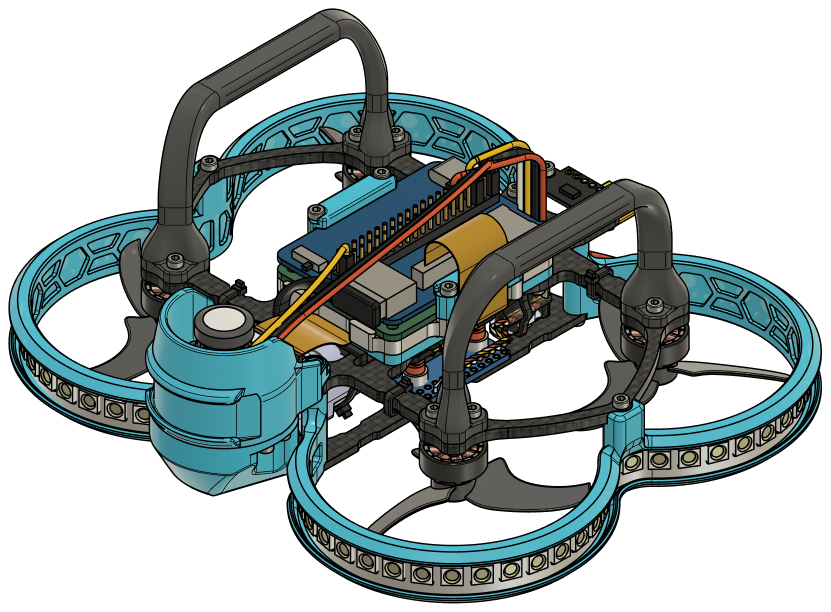
Проденьте провода питания через разъём верхней рамы и вставьте в аккумулятор
Закрепите аккумулятор лентой-липучкой за верхнюю раму