Визуальный полет в режиме Position
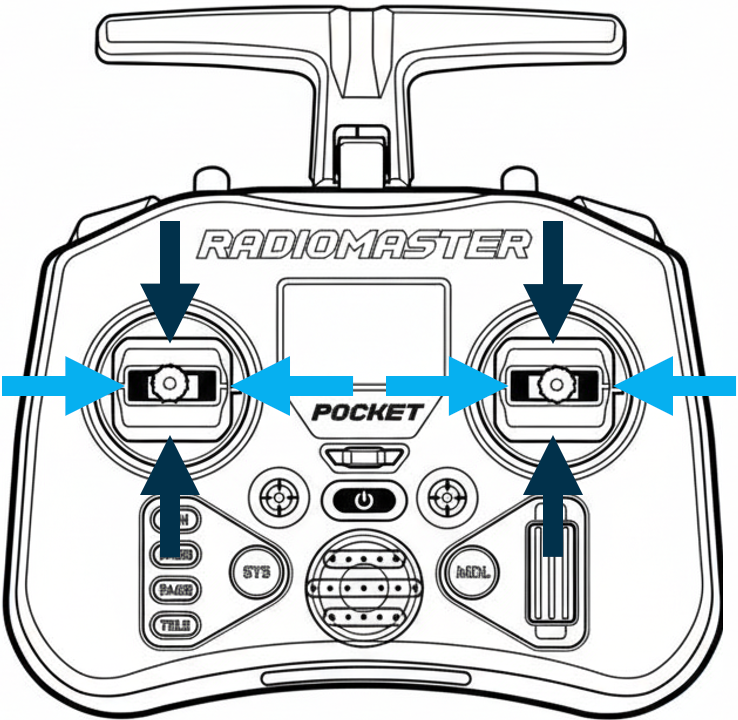
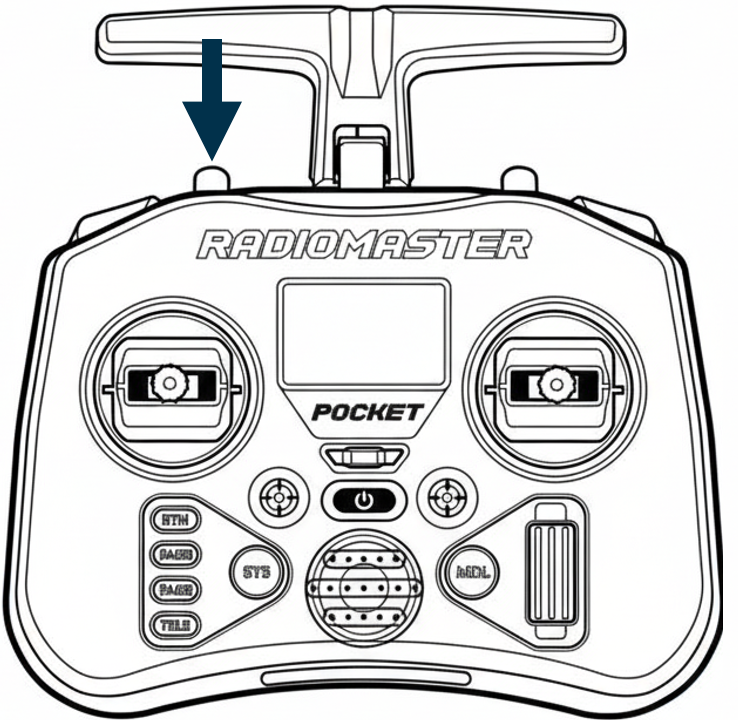
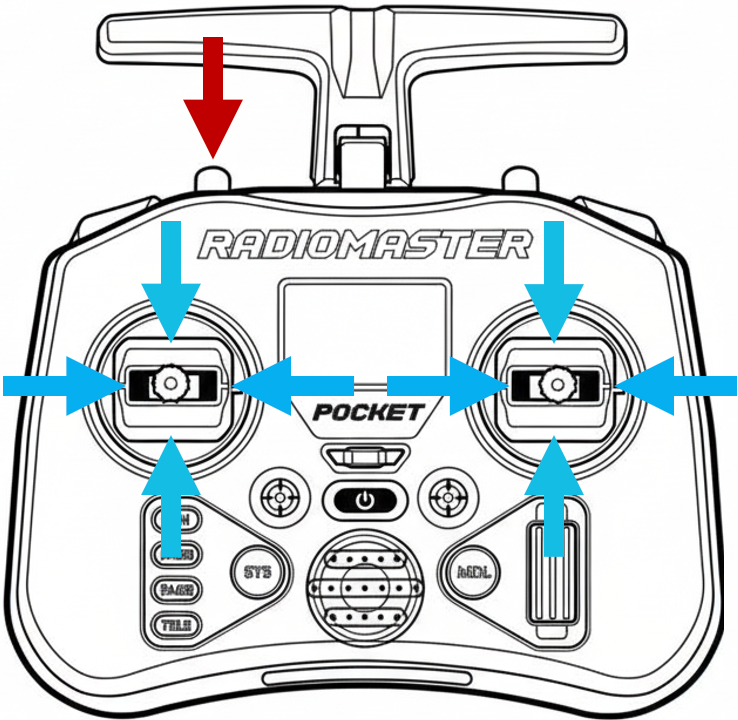
Управление БВС происходит с помощью двух стиков аппаратуры управления .По умолчанию левый стик отвечает за газ и рысканье, а правый стик за крен и тангаж. Данные термины используются для всех летательных аппаратов, от самолетов до квадрокоптеров.
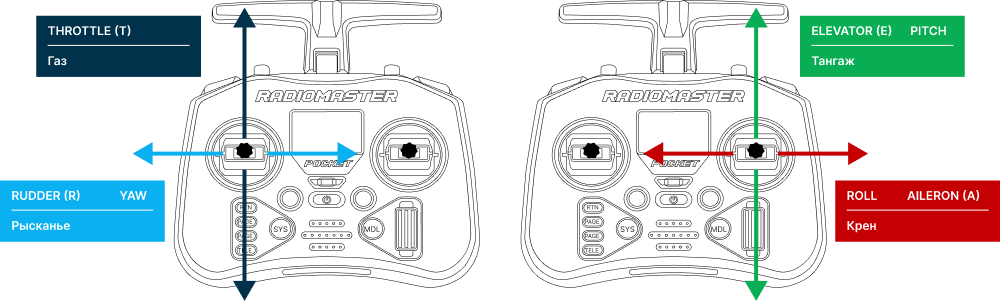
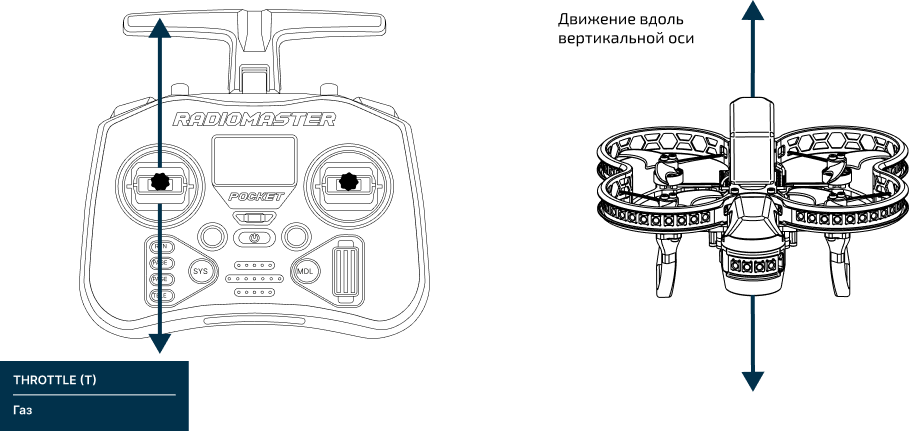
Газ (throttle) – отвечает за скорость вращения двигателей
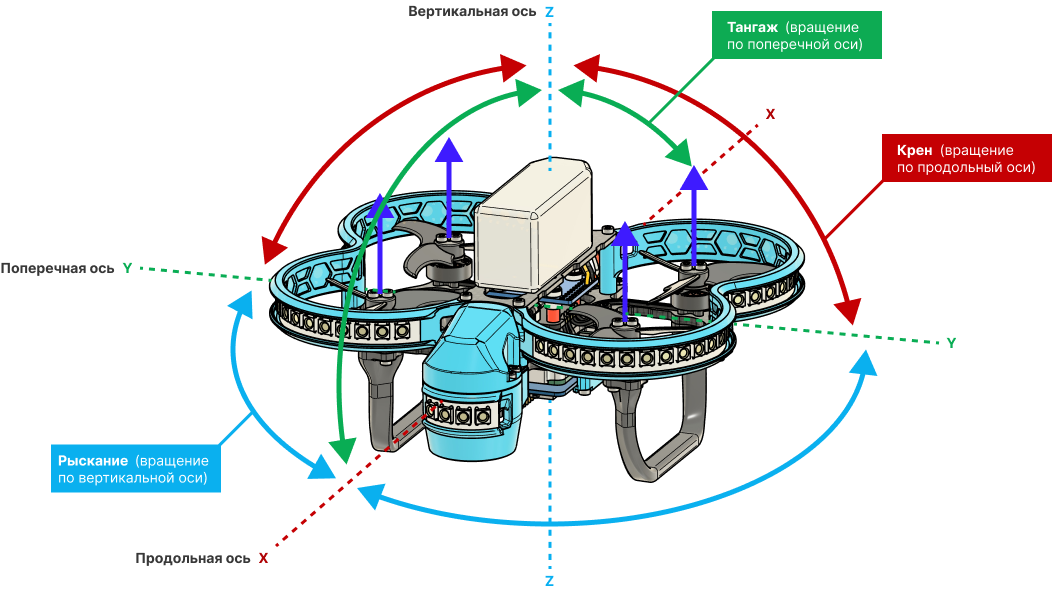
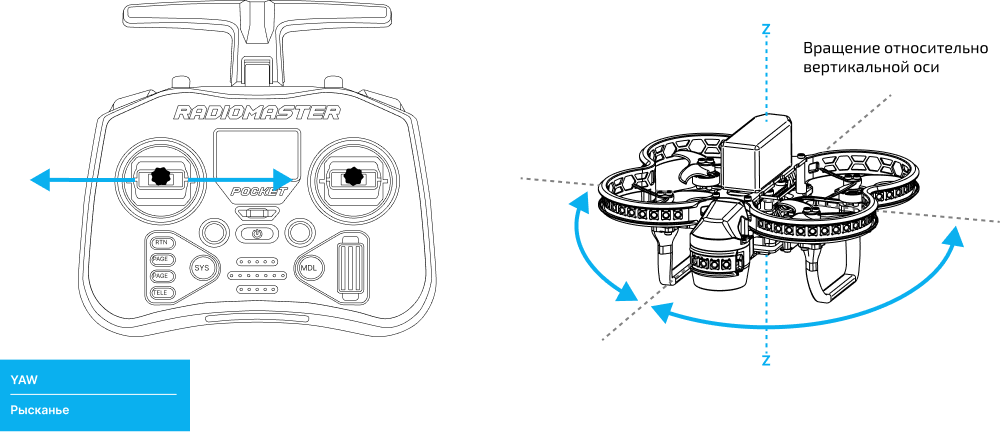
Рысканье (yaw) – отвечает за повороты вокруг вертикальной оси (Z), по часовой (при наклоне вправо) и против часовой (при наклоне влево) стрелки
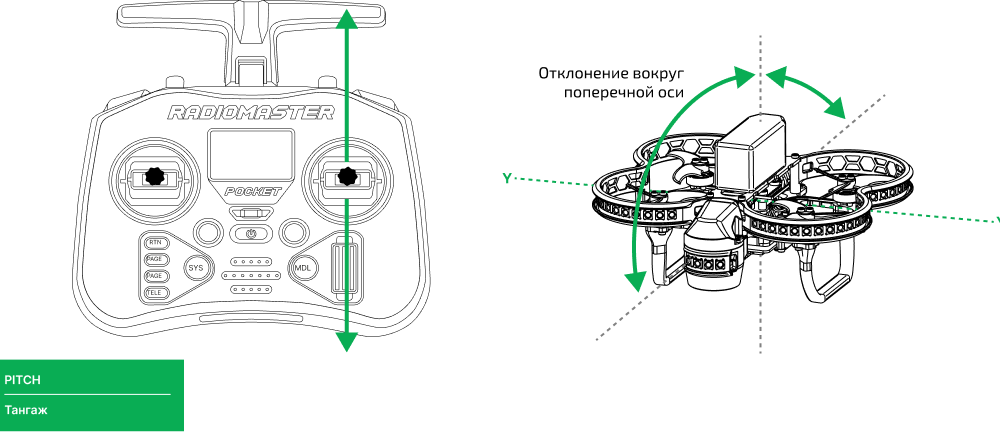
Тангаж (pitch) – отвечает за наклон или движение вперёд/назад
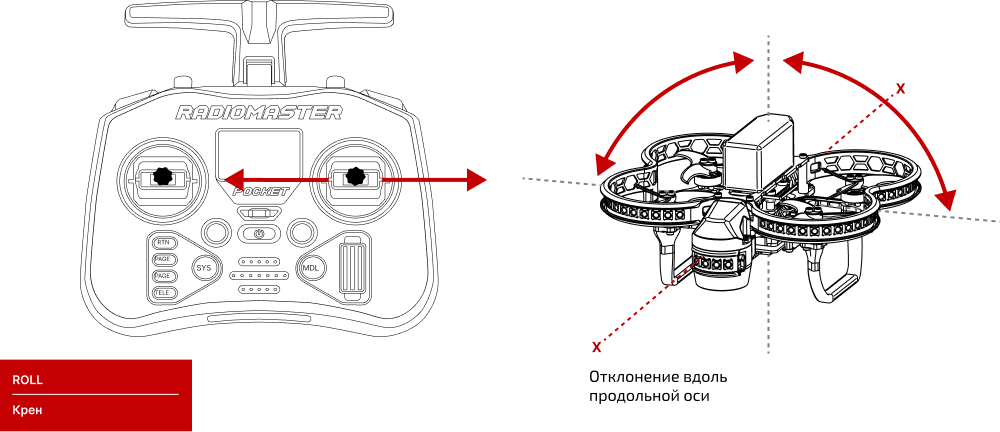
Крен (roll) – отвечает за наклон или движение влево/вправо
Все описанные действий БВС подразумеваются относительно его ориентации
Визуальный полет (ручное управление)
При визуальном пилотировании пилот управляет квадрокоптером напрямую. GPS, данные с компьютерного зрения и барометр не используются. Для полетов в этих режимах необходимы хорошие навыки пилотирования мультикоптеров
Режимы полета:
STABILIZED — стабилизация горизонтального положения, необходимо ручное поддержание высоты:
- Throttle - управление газом происходит из нижнего положения стика;
- Yaw - управляет скоростью поворота в горизонтальной плоскости;
- Roll и Pitch - управляют углом наклона в горизонтальной плоскости (полетом) При возврате правого стика в центральное положение БВС выровняется, но продолжит движение по инерции и под воздействием внешних сил.
ALTITUDE — режим полета с удержанием высоты и со стабилизацией горизонтального положения:
- Throttle - управление газом происходит из центрального положения стика и отвечает за скорость подъема/спуска;
- Yaw - управляет скоростью поворота в горизонтальной плоскости;
- Roll и Pitch - управляют углом наклона БВС в горизонтальной плоскости (полетом); При возврате обоих стиков в центральное положение БВС выровняется и будет удерживать текущую высоту, но продолжит движение по инерции и под воздействием внешних сил.
POSITION — режим полета с полным удержанием положения в пространстве:
- Throttle - управление газом происходит из центрального положения стика и отвечает за скорость подъема/спуска;
- Yaw - управляет скоростью поворота в горизонтальной плоскости;
- Roll и Pitch - управляют углом наклона БВС в горизонтальной плоскости (полетом); При возврате обоих стиков в центральное положение БВС будет зафиксирован в позиции в 3D-пространстве, компенсируя ветер и другие силы.
Полет в режиме Position
- Разместите карту ArUco в центре полётной зоны
- Включить аппаратуру управления
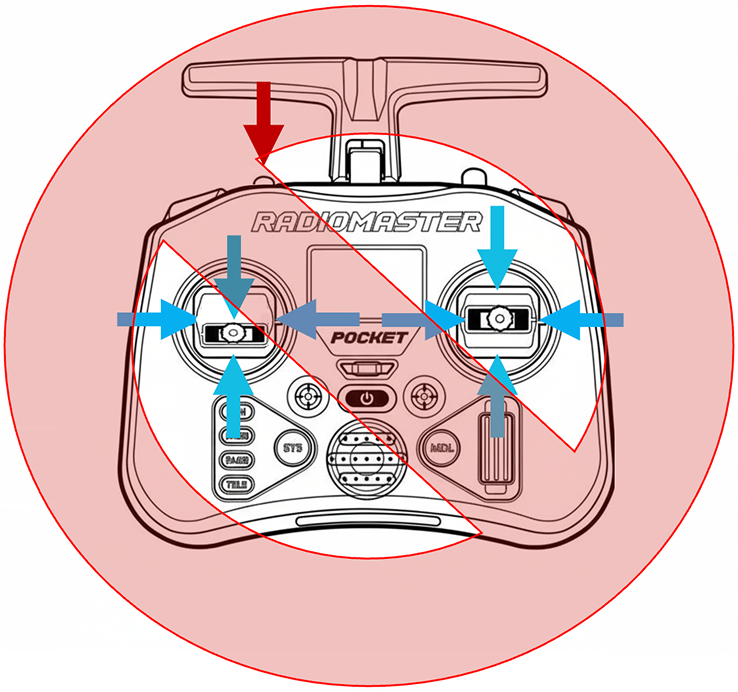
Перевести стики управления в центральное положение
На аппаратуре управления переведите переключатель SB в положение Position (как было настроено в разделе Настройка полётного контроллера)
Установите БВС в полетную зону
Подключить АКБ к БВС
Дождитесь полного включения БВС
БВС полностью включен если Wi-Fi сеть появилась для подключения
- Отойдите от БВС.
- Подключитесь к БВС по Wi-Fi
- Откройте веб-интерфейс
- Запустите онлайн терминал
Запустите в терминале автоматическую проверку корректности настроек и работы всех подсистем БВС
rosrun clover selfcheck.py
Описание некоторых проверок:
- FCU – проверка корректности соединения с полетным контроллером;
- IMU – проверка корректности данных с IMU;
- Local position – наличие локальной позиции ;
- Velocity estimation – оценка скоростей БВС;
- Global position (GPS) – наличие глобальной позиции (требуется GPS);
- Camera – корректная работа камеры;
- ArUco – проверка работы распознавания ArUco-маркеров;
- VPE – проверка правильности работы VPE;
- Rangefinder – проверка работы дальномера;
- RPi health – проверка состояния бортового компьютера;
- CPU usage – проверка загруженности процессора бортового компьютера.
Убедитесь, что основные пункты отмечены как успешные (зелёные/«OK»):
- ArUco — маркеры распознаются;
- Local position — позиция вычислена;
- FCU — связь с полётным контроллером есть;
- Velocity estimation — скорость определена (критично!).
Если проверка selfcheck.py показывает ошибки (красный цвет) - взлёт запрещён. Исправьте ошибки или обратитесь в техподдержку
Запуск БВС и взлет
Кнопка SA - Arm/Disarm (включение/отключение моторов)
Переключатель SB - Выбор режима полёта
На пульте переведите переключатель SB в положение Position
Нажмите и отпустите кнопку SA (Arm), моторы начнут вращаться на минимальных оборотах
Кнопка должна заблокироваться в нажатом положении
Плавно поднимите левый стик (Throttle) вверх. БВС взлетит и автоматически зависнет на высоте ~1 метра
Попробуйте немного подвигать правым стиком (Pitch/Roll). БВС будет двигаться в пространстве, а при отпускании стика — снова зависать на месте
Не улетайте далеко от поля меток, иначе БВС потеряется
Посадка и выключение
- Для посадки плавно опустите левый стик (Throttle) вниз до полной посадки БВС
- Нажмите и отпустите кнопку SA (Disarm)
Кнопка должна выйти из заблокированного положения
- В целях безопасности нажмите и отпустите кнопку SD (Kill Switch)
Кнопка должна заблокироваться в нажатом положении
- Отключите АКБ от БВС
- Выключите аппаратуру управления