Автоматическая проверка
- Разместите карту ArUco-меток в центре полётной зоны
- Включите аппаратуру управления
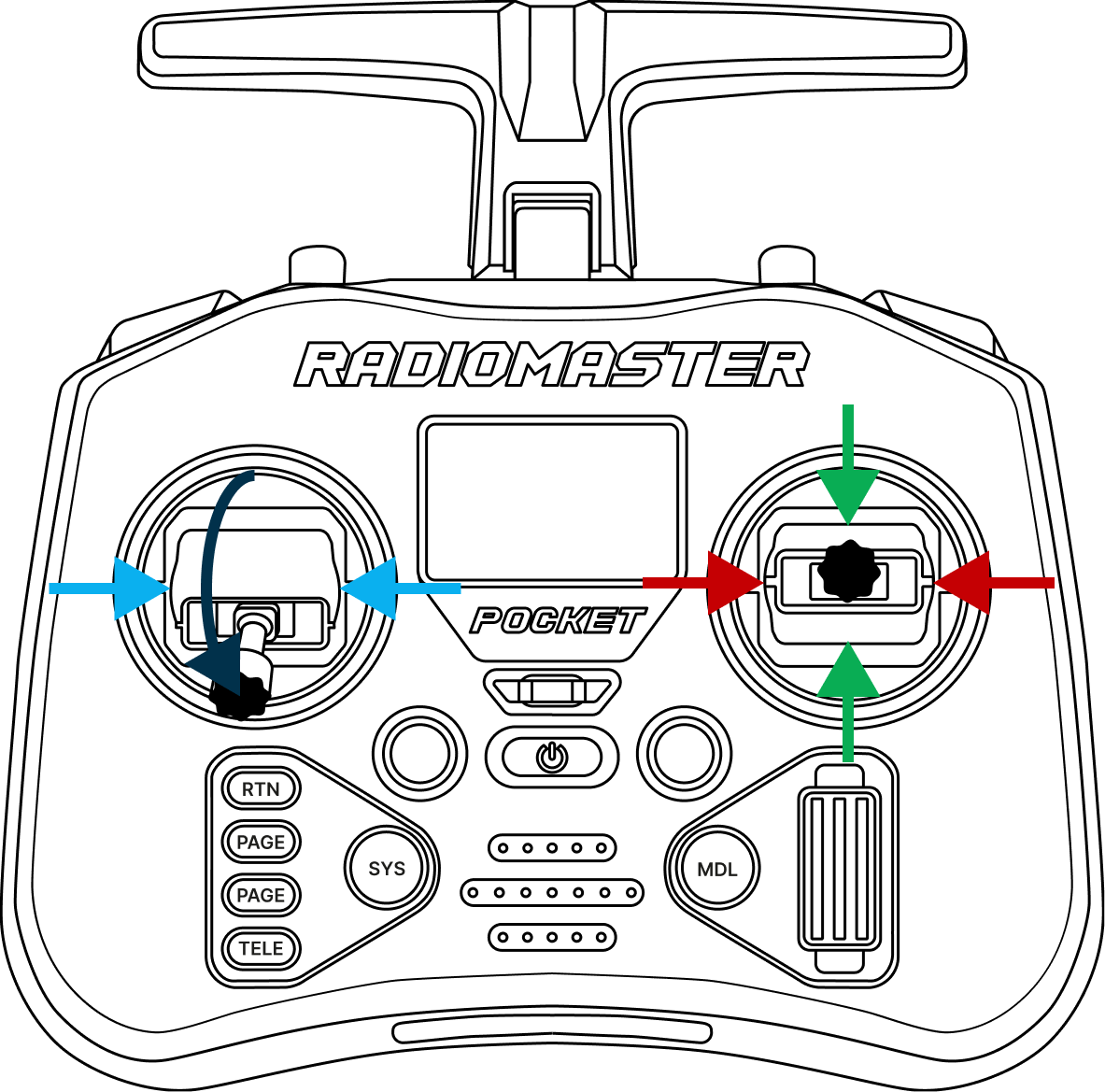
Перевести левый стик вниз стики управления , а правый в центральное положение
Установите БВС на точку взлета
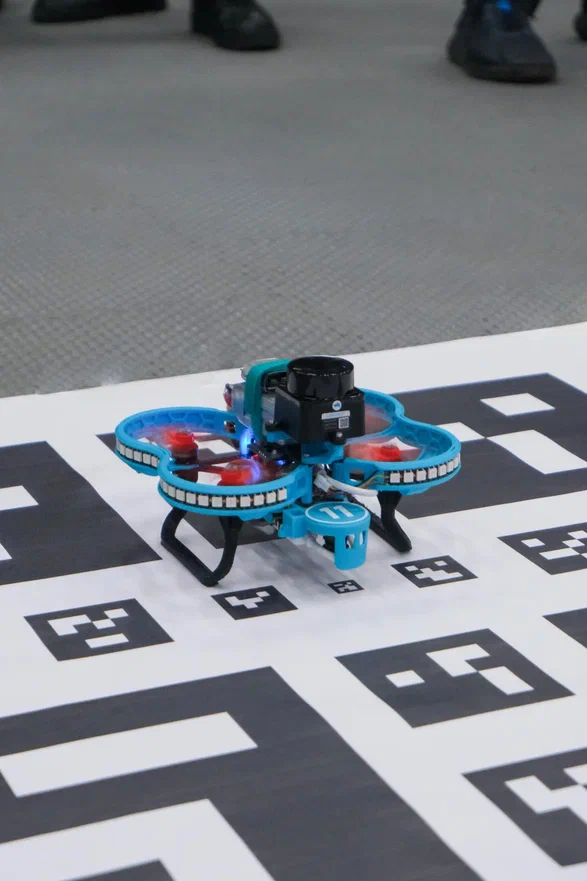
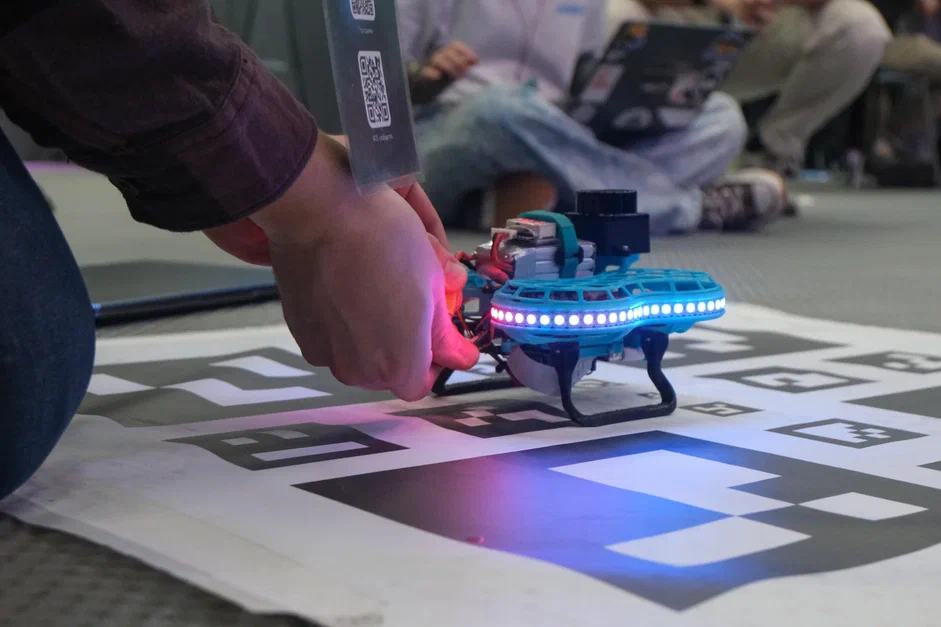
Если на площадке взлёта отсутствует малая ArUco-метка (размером менее 1,5 см) под камерой, поднимите БВС над картой ArUco-меток, чтобы обеспечить их обнаружение камерой.
Подключите АКБ к БВС
Дождитесь полного включения БВС
БВС полностью включен, если Wi-Fi сеть появилась для подключения.
- Отойдите от БВС
- Подключитесь к БВС по Wi-Fi
- Откройте веб-интерфейс
- Запустите онлайн терминал
Запустите в терминале автоматическую проверку корректности настроек и работы всех подсистем БВС
rosrun sverk selfcheck.py
Описание некоторых проверок:
- FCU – проверка корректности соединения с полетным контроллером
- IMU – проверка корректности данных с IMU
- Local position – наличие локальной позиции БВС
- Velocity estimation – оценка скоростей БВС (запрещено выполнять автономный взлет при ошибках в этой проверке)
- Global position (GPS) – наличие глобальной позиции (требуется GPS)
- Camera – корректная работа камеры
- ArUco – проверка работы распознавания ArUco-маркеров
- VPE – проверка правильности работы VPE
- Rangefinder – проверка работы дальномера
- RPi health – проверка состояния бортового компьютера
- CPU usage – проверка загруженности процессора бортового компьютера
Убедитесь, что основные пункты отмечены как успешные (зелёные/«OK»):
- ArUco — маркеры распознаются
- Local position — позиция вычислена
- FCU — связь с полётным контроллером есть
- Velocity estimation — скорость определена.
Если проверка selfcheck.py показывает ошибки (красный цвет) - взлёт запрещён.
Исправьте ошибки или обратитесь в техподдержку.