Быстрый старт
Подключение питания и сети
- Подключите заряженный АКБ, ждите загрузки бортового компьютера (около 30-60 секунд).
- Подключитесь к Wi-Fi сети, который раздаёт Обрик. Если Обрик подключен к роутеру, узнайте его IP-адрес у организатора или посмотрите на экране.
Доступ к управлению. Подключиться к Обрику можно двумя способами:
через веб-интерфейс. Введите IP-адрес в адресную строку браузера. В веб-интерфейсе доступен терминал. На главной странице нажмите на Open web terminal. Введите пароль:
raspberry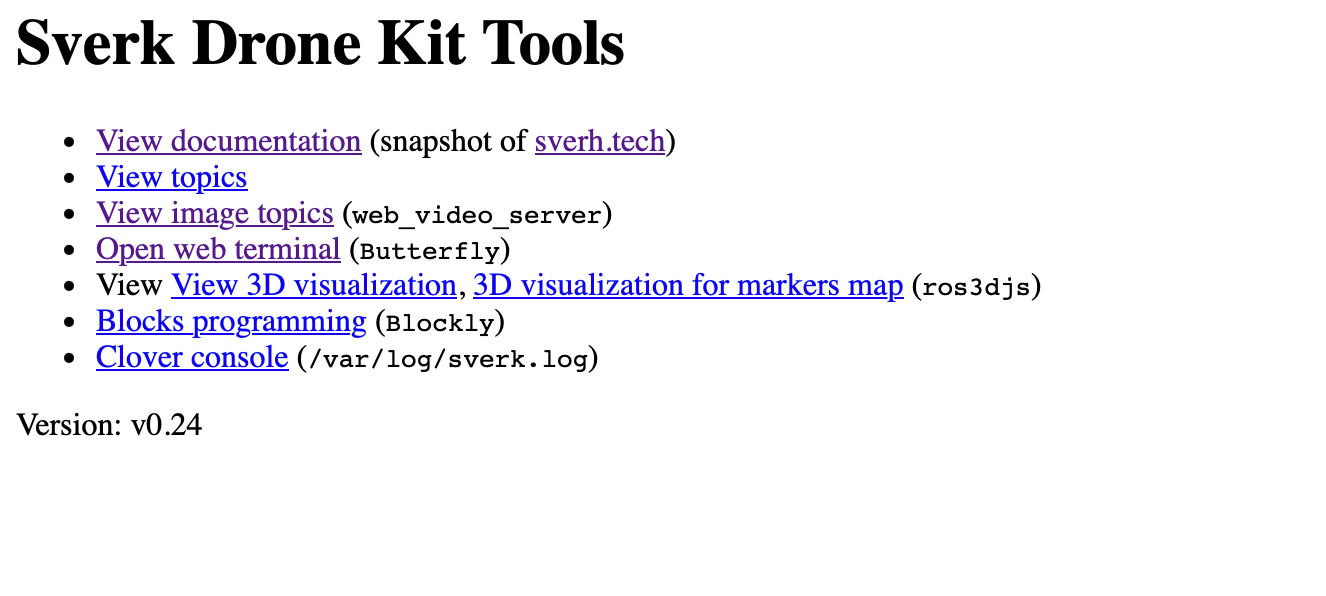
SSH доступ через терминал ПК:
ssh pi@айпи_адрес_дрона
Проверка камеры и ArUco карты. В веб-интерфейсе перейдите в раздел View image topics
Проверка камеры. Выберите топик image_raw. Убедитесь, что передается четкое изображение.

Проверка карты. Выберите топик
aruco_map/image. Проверьте, какая ArUco карта загружена на Обрик.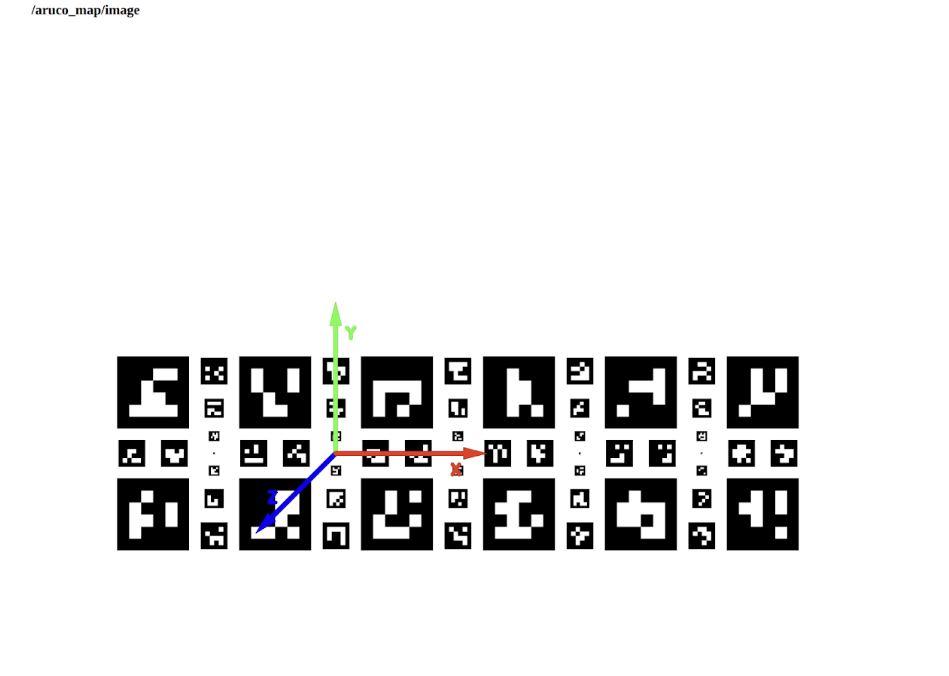
Настройка ArUco карты
Если в aruco_map/image карта не соответствует той, по которой вы будете летать, её нужно заменить.
Зайдите в терминал, введите команду:
cd catkin_ws/src/sverk/aruco_pose/mapВ этой директории расположены txt файлы с ArUco-картами.
Если среди файлов нет нужной вам карты, создайте её при помощи команды:
nano название_файла.txtСохраните файл:
Сtrl+X -> Y ->EnterДалее нужно заменить данные об ArUco-карте в launch файле:
cd catkin_ws/src/sverk/sverk/launch/aruco.launch`` nano aruco.launchПерезагрузите Обрик:
sudo systemctl restart sverk
Диагностика
Для автоматической проверки Обрика выполните команду:
rosrun sverk selfcheck.pyУбедитесь, что все критические показатели отмечены как ОК.
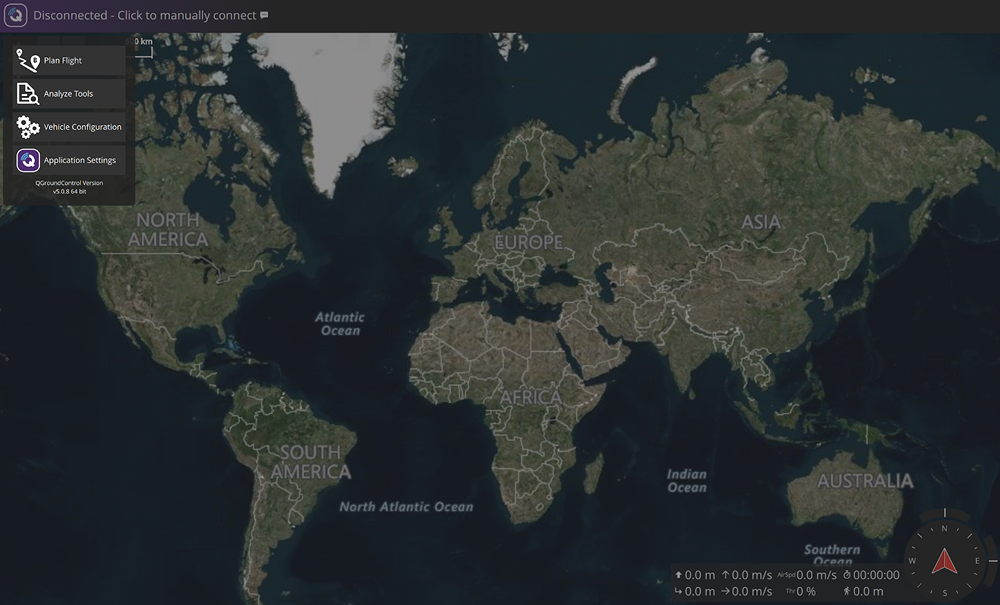
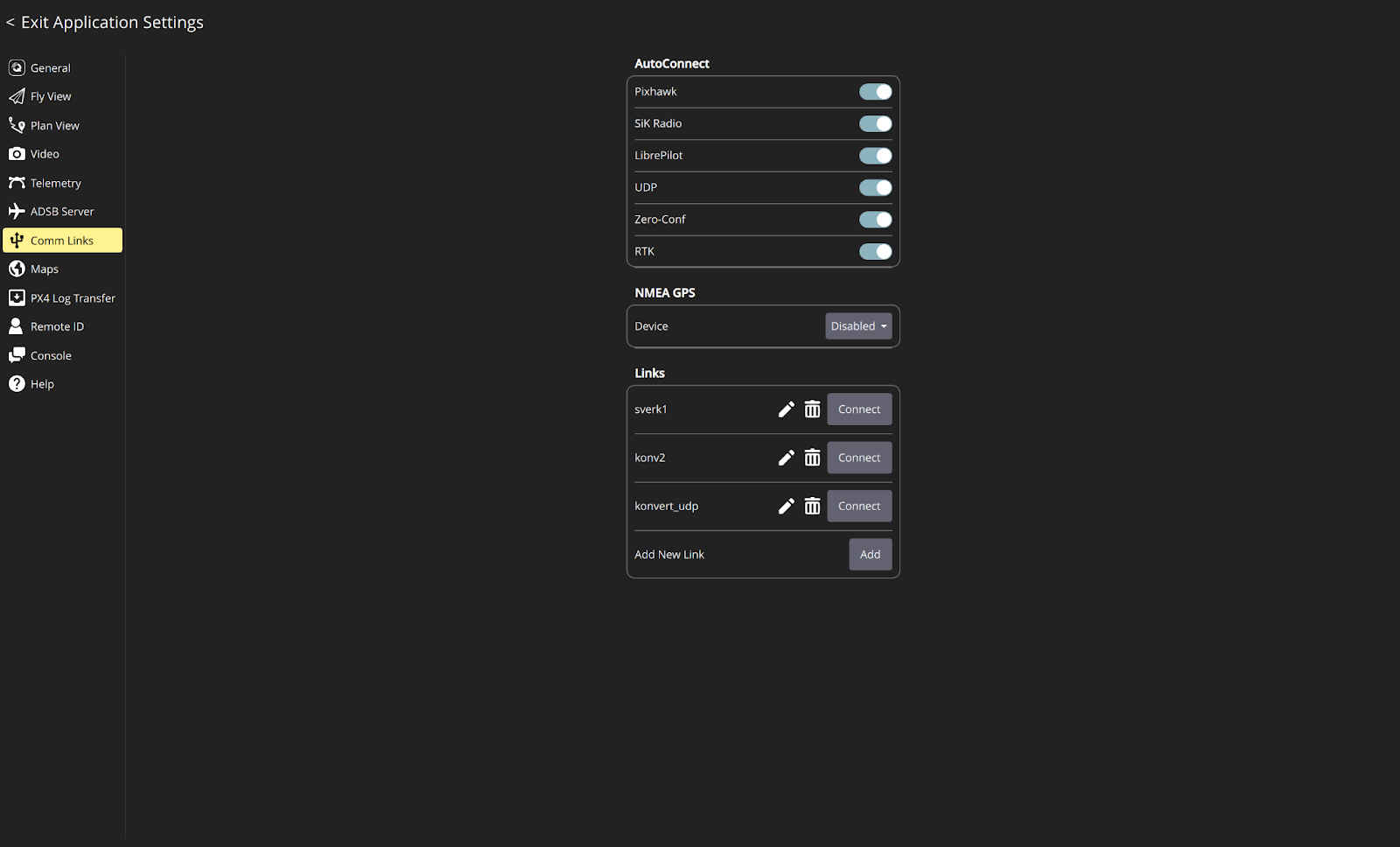
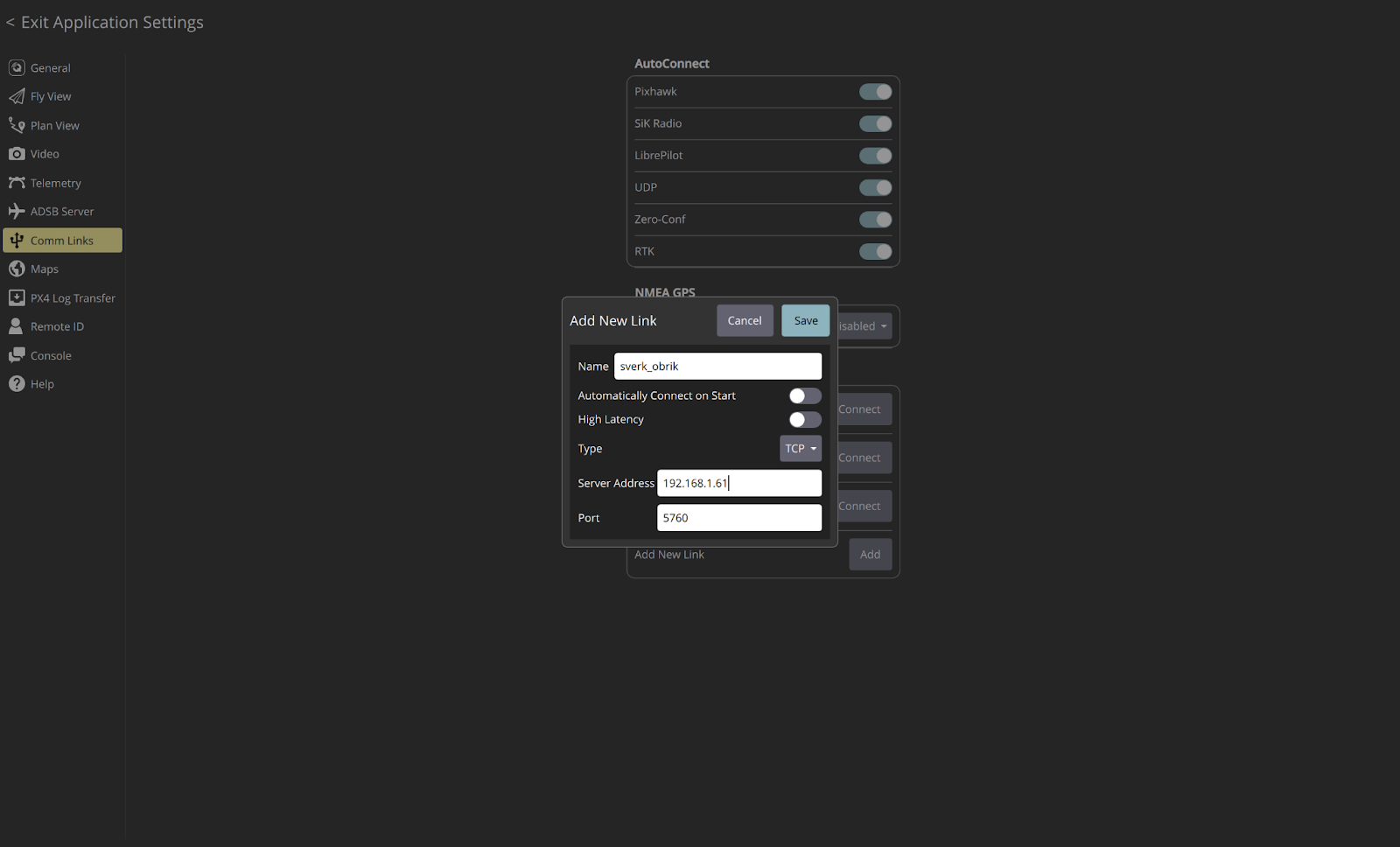
Настройка полётного контроллера в QGroundControl
Откалибруйте гироскоп (Sensors -> Gyroscope)
Откалибруйте акселерометр (Sensors -> Accelerometer). Поочерёдно зафиксируйте Обрик во всех положениях, дожидаясь появления зелёной рамки
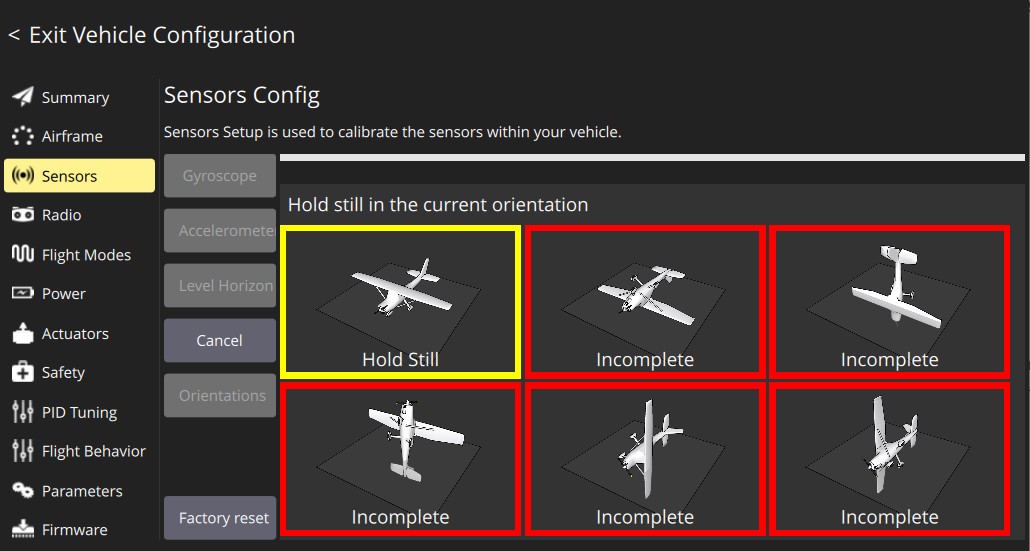
Откалибруйте линию горизонта (Sensors -> Level Horizon)
- Установите дрон на ровную поверхность
- Нажмите Оk
После калибровки Обрик готов к запуску.